

Control method and controller based on robust servo control and model adaptive control
An adaptive controller and model self-adaptive technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of unmanned aerial vehicles affecting flight control accuracy and safety, so as to improve dynamic response ability, Ensure steady-state response indicators and fast response effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The embodiments of the present invention are described in detail below, and the present embodiments are implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
[0074] This embodiment provides a technical solution:
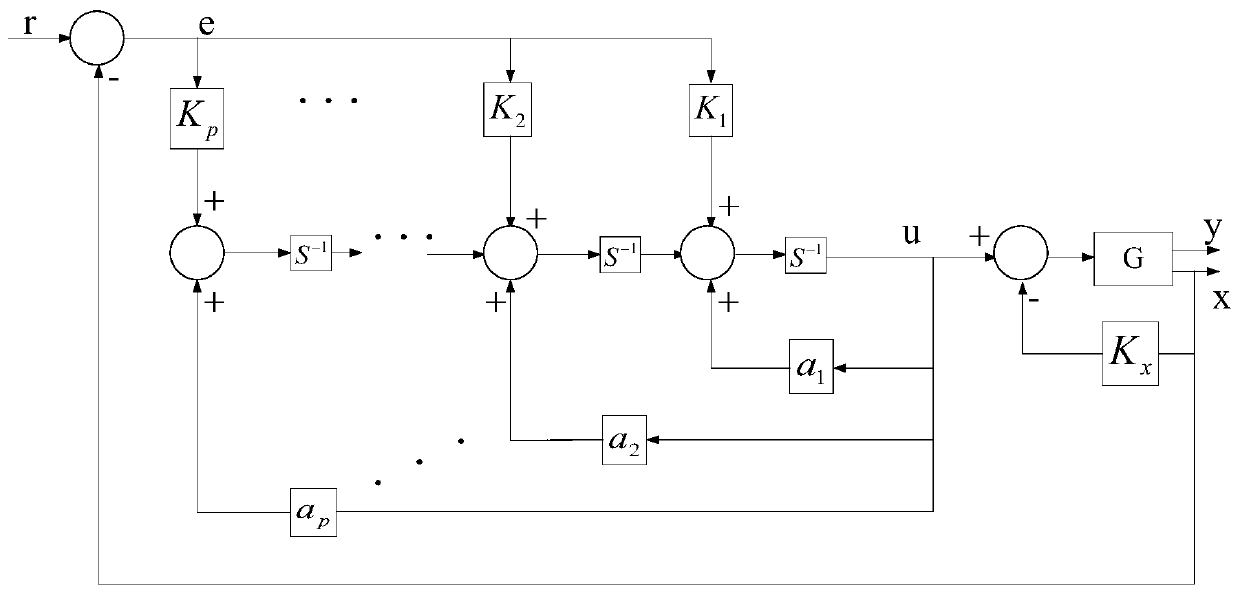
[0075] Robust Servo Control Method Based on RSLQR
[0076] The present invention proposes a robust linear quadratic tracker based on RSLQR for the robustness requirements of signal tracking in practical applications, such as figure 1 shown. In order to achieve the above goals, it is first necessary to determine the expected input polynomial of the system, and the command input signal r(t) can satisfy the polynomial: Define that the variable z to be controlled belongs to the subset of the output variable y, and the control target of the system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More