

Line structure cursor positioning method based on chessboard target
A calibration method and technology of marking lines, applied in the direction of using optical devices, measuring devices, instruments, etc., can solve the problems of complex calculation, few feature points, unfavorable extraction of chessboard corner points and light bar center points, etc., and achieve the effect of simple calibration algorithm.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
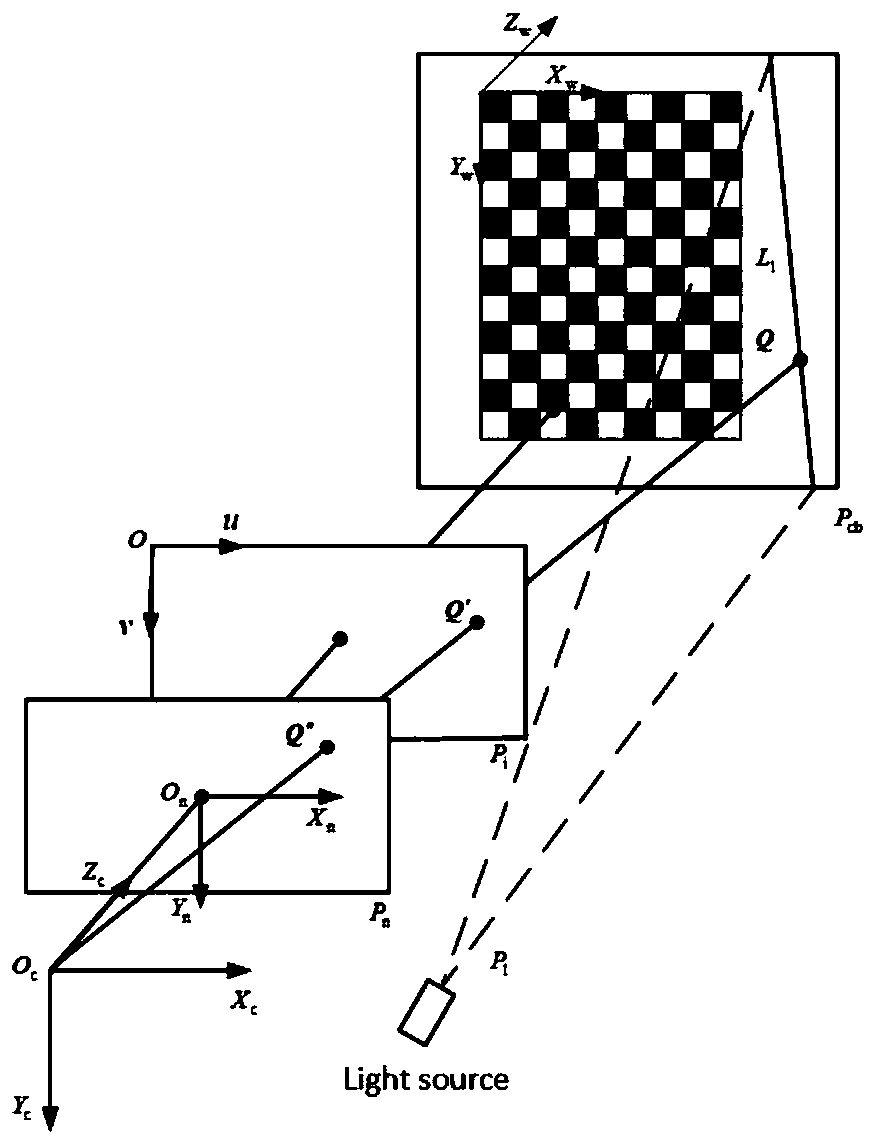
[0036] First of all, the camera perspective projection relationship in the present invention involves four coordinate systems, namely ouv pixel coordinate system, Ouv pixel coordinate system, n x n Y n Z n Normalized image coordinate system, O c x c Y c Z c camera coordinate system, and O w x w Y w Z w world coordinate system, such as figure 1 shown.
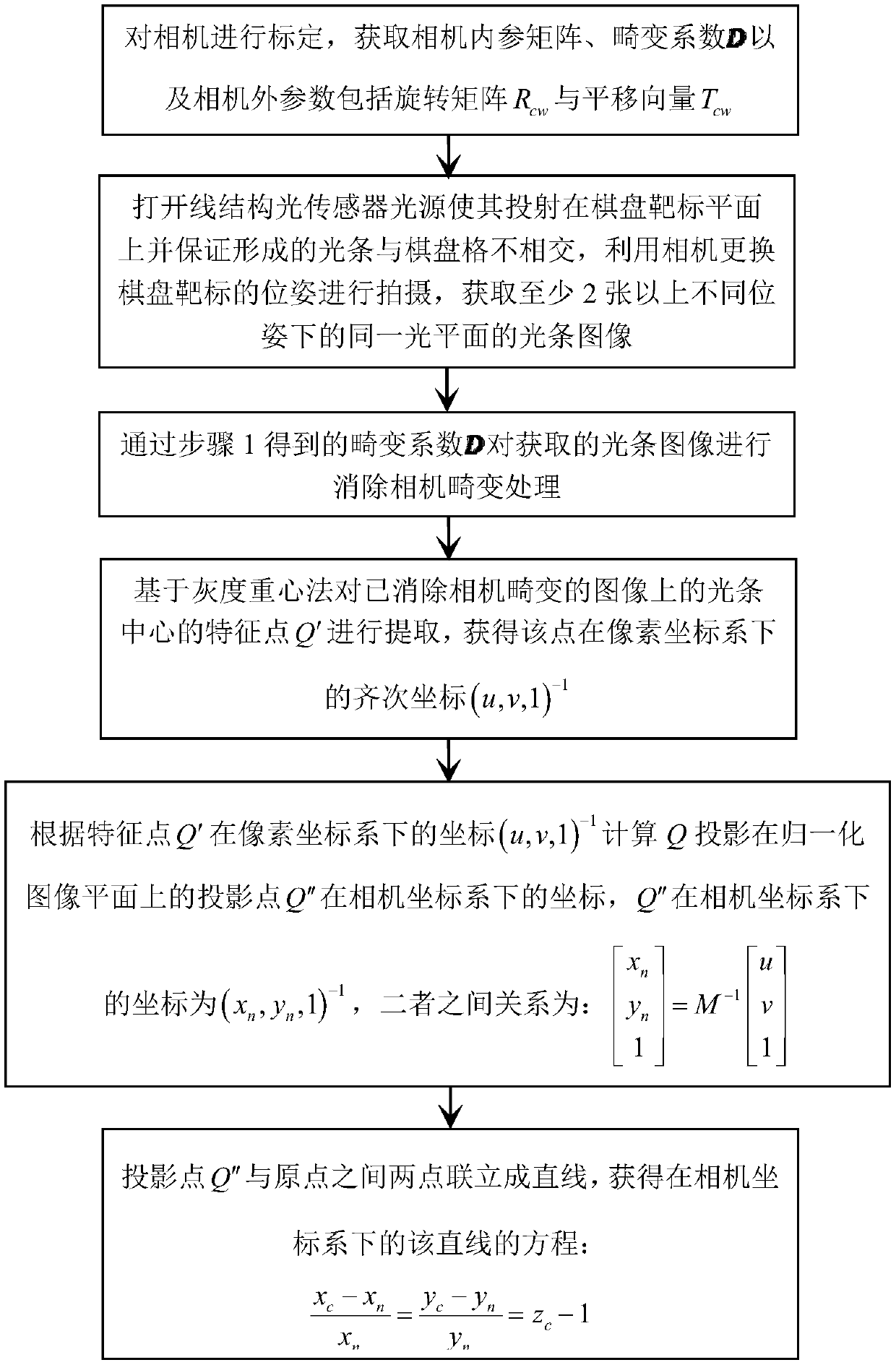
[0037] The calibration method of the line structure cursor proposed by the present invention comprises the following specific steps:
[0038] Step 1, use Zhang Zhengyou calibration method to calibrate the camera, and obtain the camera internal parameter matrix Distortion coefficient D and camera extrinsic parameters including rotation matrix R cw with translation vector T cw ;
[0039] Among them, c x 、c y Indicates the center of the camera aperture, f y , f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More