Multi-agent sub-target division path planning method and system based on solubility potential field
A path planning and target path technology, applied to road network navigators, measuring devices, instruments, etc., can solve the problems of slow convergence speed, difficult to obtain samples, and large amount of calculation, and achieve the effect of improving the convergence speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
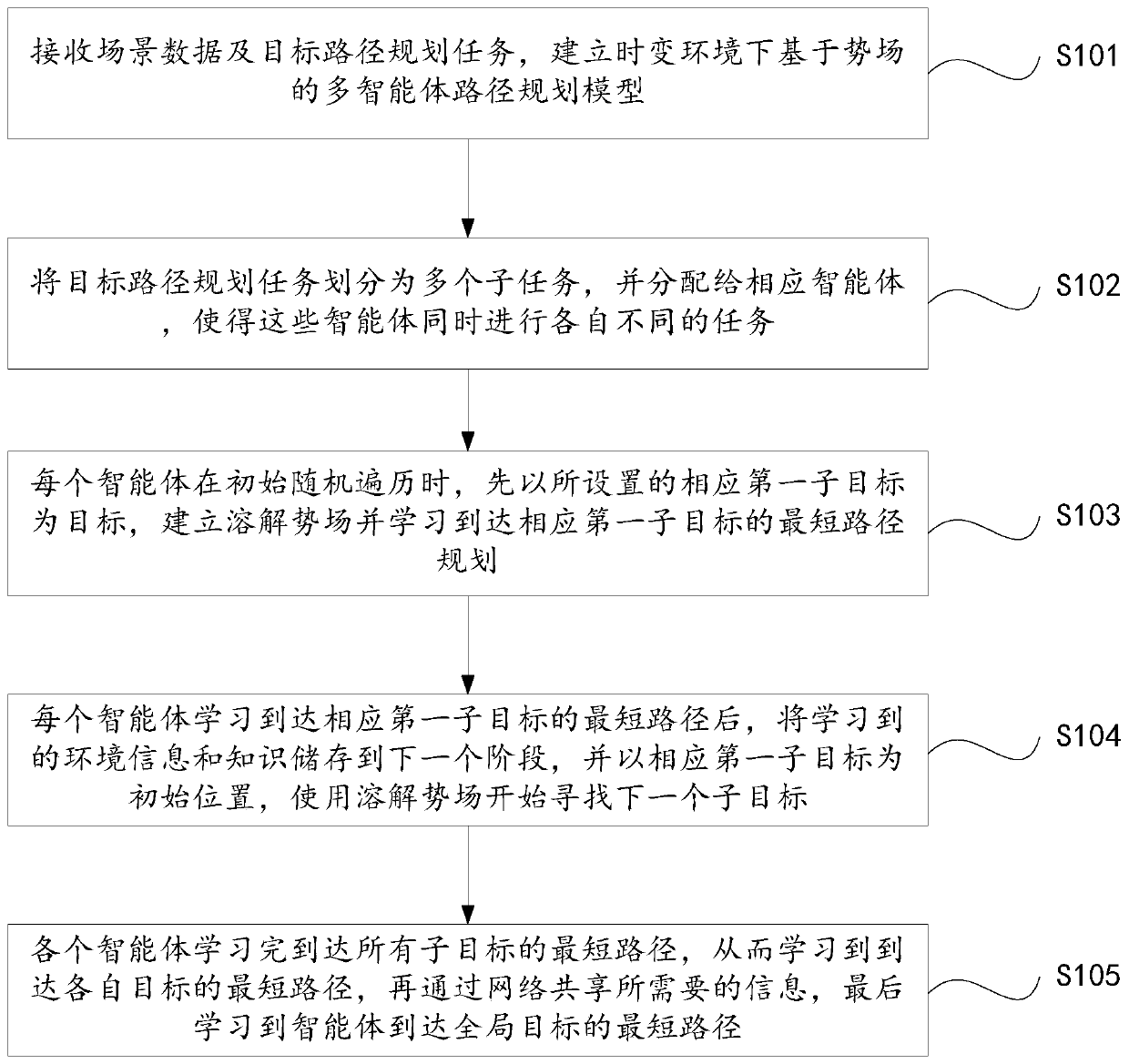
[0040] figure 1 It is a flowchart of a multi-agent sub-goal division path planning method based on a dissolution potential field provided by an embodiment of the present disclosure.
[0041] Such as figure 1 As shown, a kind of solution potential field-based multi-agent sub-goal division path planning method in this embodiment includes:
[0042] S101: Receive scene data and a target path planning task, and establish a multi-agent path planning model based on a potential field in a time-varying environment.
[0043] In a specific implementation, the multi-agent path planning model includes but is not limited to initial points, target points, stationary obstacles and moving obstacles.
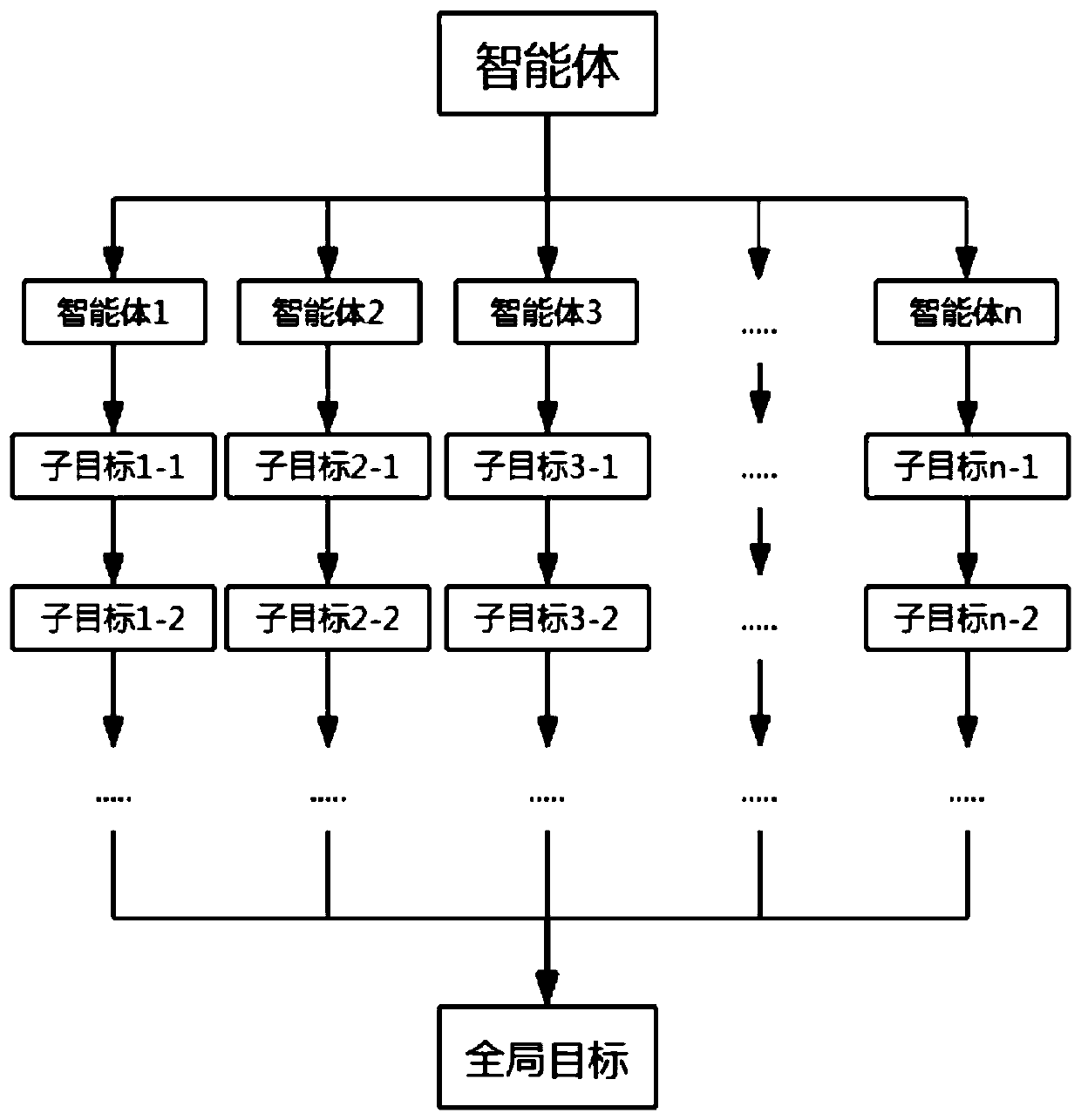
[0044] S102: Divide the target path planning task into multiple subtasks, and assign them to corresponding agents, so that these agents perform different tasks at the same time.
[0045] Such as figure 2 As shown, in order to better complete the complex target path planning task in large sce...
Embodiment 2
[0072] Such as Figure 5 As shown, a multi-agent sub-goal division path planning system based on the dissolution potential field in this embodiment includes:
[0073] (1) A multi-agent path planning model building module, which is used to receive scene data and target path planning tasks, and establish a multi-agent path planning model based on a potential field under a time-varying environment;
[0074] In the multi-agent path planning model building module, the multi-agent path planning model includes initial points, target points, stationary obstacles and moving obstacles.
[0075] (2) A goal path planning task division module, which is used to divide the goal path planning task into a plurality of subtasks, and assign them to corresponding agents, so that these agents can perform different tasks at the same time;
[0076] (3) The shortest path learning module of the first sub-goal, which is used for each agent to set up the corresponding first sub-goal as the target durin...
Embodiment 3
[0088] This embodiment provides a computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the following figure 1 The steps in the solution-based potential field-based multi-agent subgoal partitioning path planning method are shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com