

Robot for cleaning hidden frame glass curtain wall and operating method of robot
A technology of hidden frame glass curtain wall and operation method, applied in cleaning machinery, machine parts, applications, etc., can solve the problems of affecting the positioning of the robot body, low cleaning efficiency, damage to the glass curtain wall, etc., to improve reliability and safety, Fast moving, easy steering effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
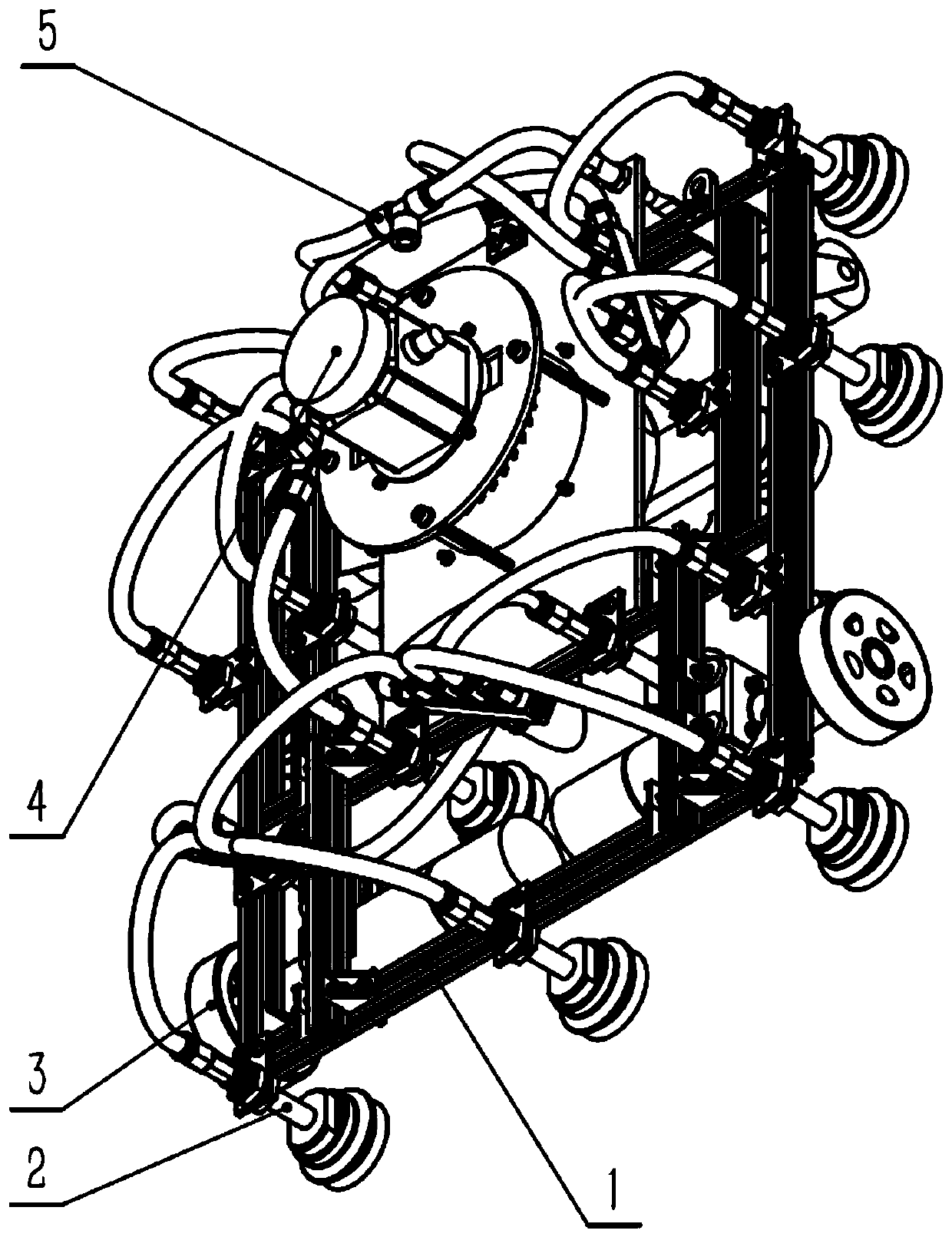
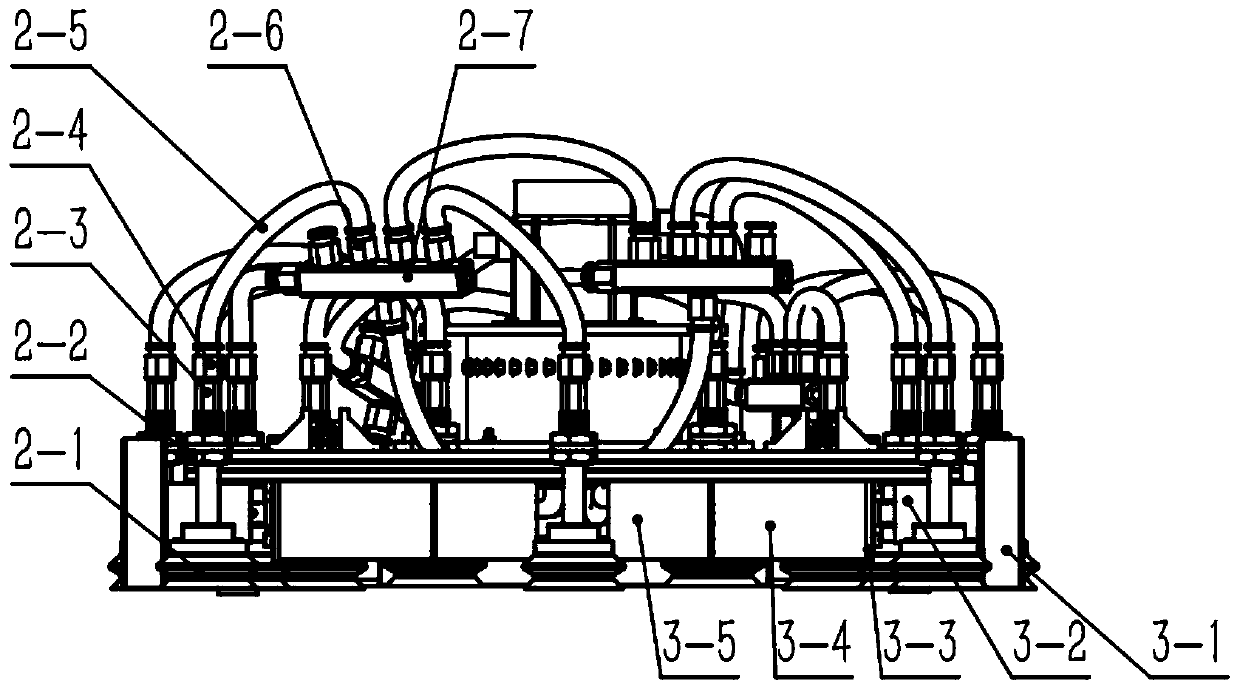
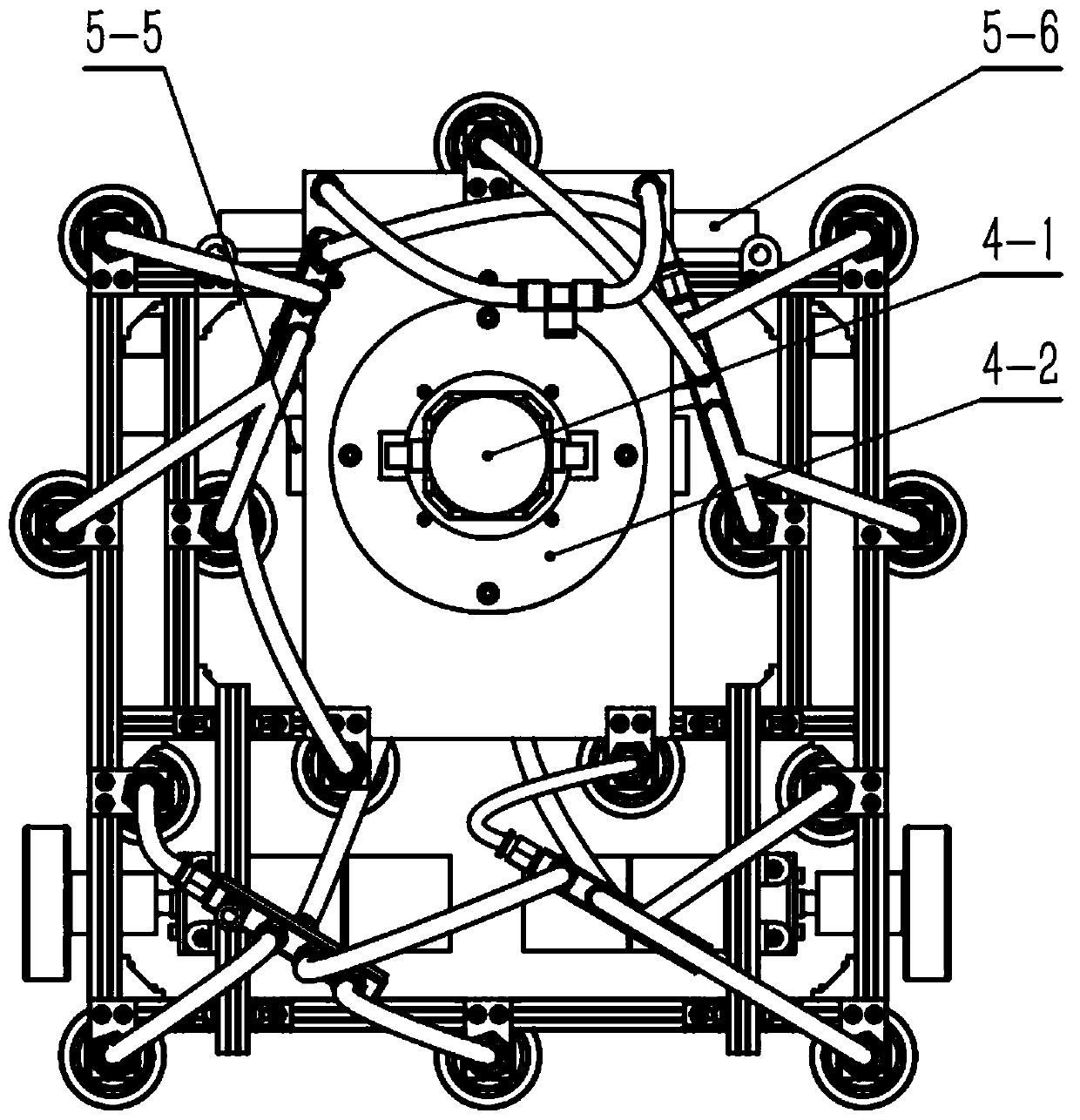
[0118] A robot for cleaning a hidden frame glass curtain wall according to an embodiment of the present invention includes: a body support 1, an adsorption mechanism 2, a moving mechanism 3, a negative pressure source 4, and a cleaning mechanism 5; an adsorption mechanism 2, a moving mechanism 3, a negative pressure The source 4 and the cleaning mechanism 5 are respectively connected to the body support 1 . The adsorption mechanism 2 includes 14 pneumatic suction cups 2-1, 14 sets of suction cup mounting nuts 2-2, 14 safety valves 2-3, 14 air pipe joints I2-4, 20 sections of air pipes 2-5, and 22 air pipe joints II2- 6 and 4 air distributors 2-7 are responsible for making the entire cleaning robot adsorb on the glass curtain wall. The moving mechanism 3 includes two groups of driving mechanisms and 2 driven wheels 3-6, and each group of driving mechanisms includes 2 driving wheels 3-1, 1 elastic coupling 3-2, 1 motor mounting support 3-3, 1 speed reducer 3-4, 1 motor 3-5 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More