

Human body detection device and method in automatic driving
A technology for human body detection and automatic driving, which is applied to measurement devices, re-radiation of sound waves, and geophysical measurements, etc., can solve the problems of increased cost, limited scope of use, and high algorithm complexity, and achieves the effect of reducing hardware costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
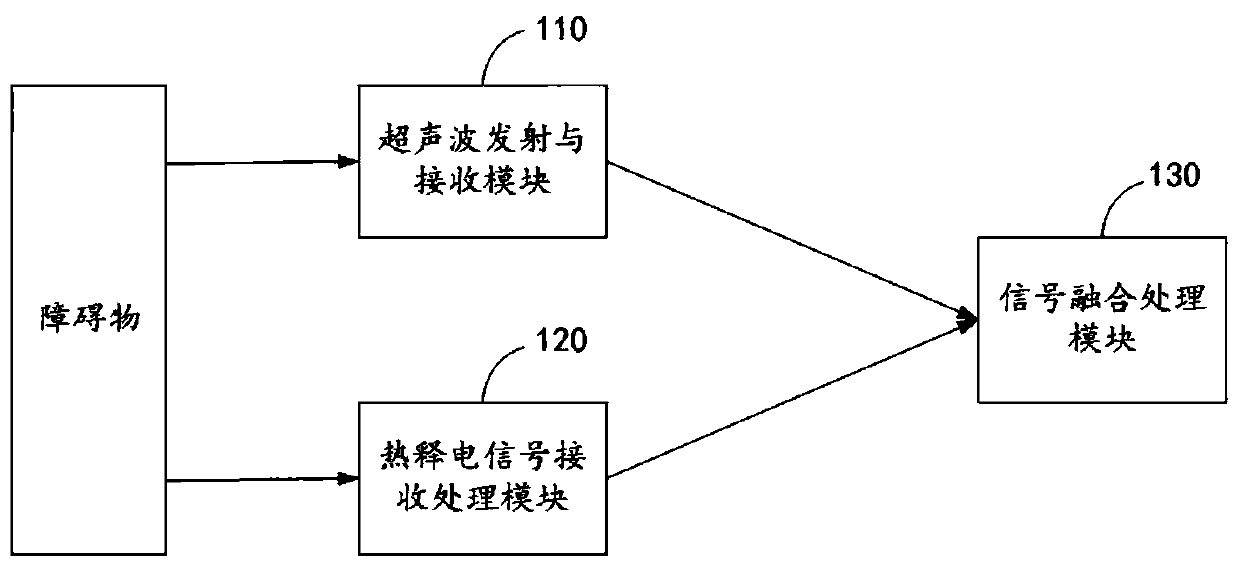
[0025] see figure 1 , a schematic structural diagram of a human body detection device in automatic driving provided by an embodiment of the present invention, including an ultrasonic transmitting and receiving module 110, a pyroelectric signal receiving and processing module 120, and a signal fusion processing module 130:
[0026] The ultrasonic transmitting and receiving module 110 is used to transmit ultrasonic signals through the ultrasonic transmitting circuit and receive the return signal by the receiving circuit. The time difference between the transmitted signal and the returned signal is used to calculate the distance between the human detection device in the automatic driving and the target, and form a mapping table of energy and distance.
[0027] The ultrasonic transmitting circuit is used to transmit ultrasonic waves, and the receiving circuit is used to receive the reflected signals generated when the ultrasonic waves encounter obstacles. According to the propagat...
Embodiment 2
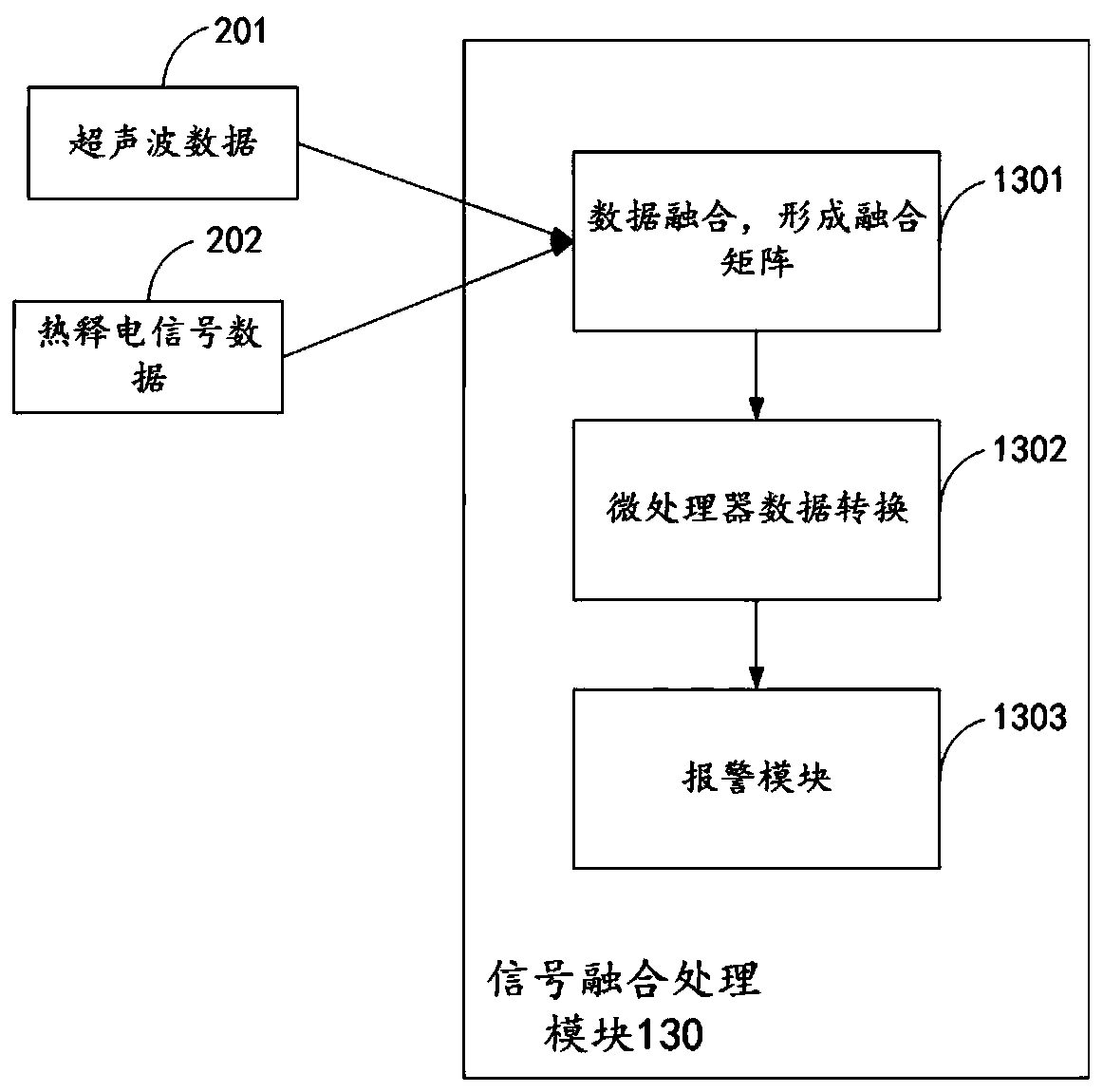
[0043] figure 2 Another structural schematic diagram of the human body detection device in automatic driving provided by Embodiment 2 of the present invention. On the basis of Embodiment 1, the signal fusion processing module 130 is described in detail:
[0044] The fusion processing ultrasonic data and pyroelectric data generated by the ultrasonic transmitting and receiving module 110 and the pyroelectric signal receiving processing module 120, specifically, the ultrasonic data 201 and the pyroelectric signal data 202 are input to the signal fusion processing module 130 , wherein, the ultrasonic data 201 may include ultrasonic emission, echo data, and calculated obstacle distance data, as well as the mapping table data formed by calibration, and the pyroelectric signal data may include Fourier transform and matrix The pyroelectric signal processed by optimization, and the human body information classification model data formed by binary classification training.
[0045] In ...
Embodiment 3
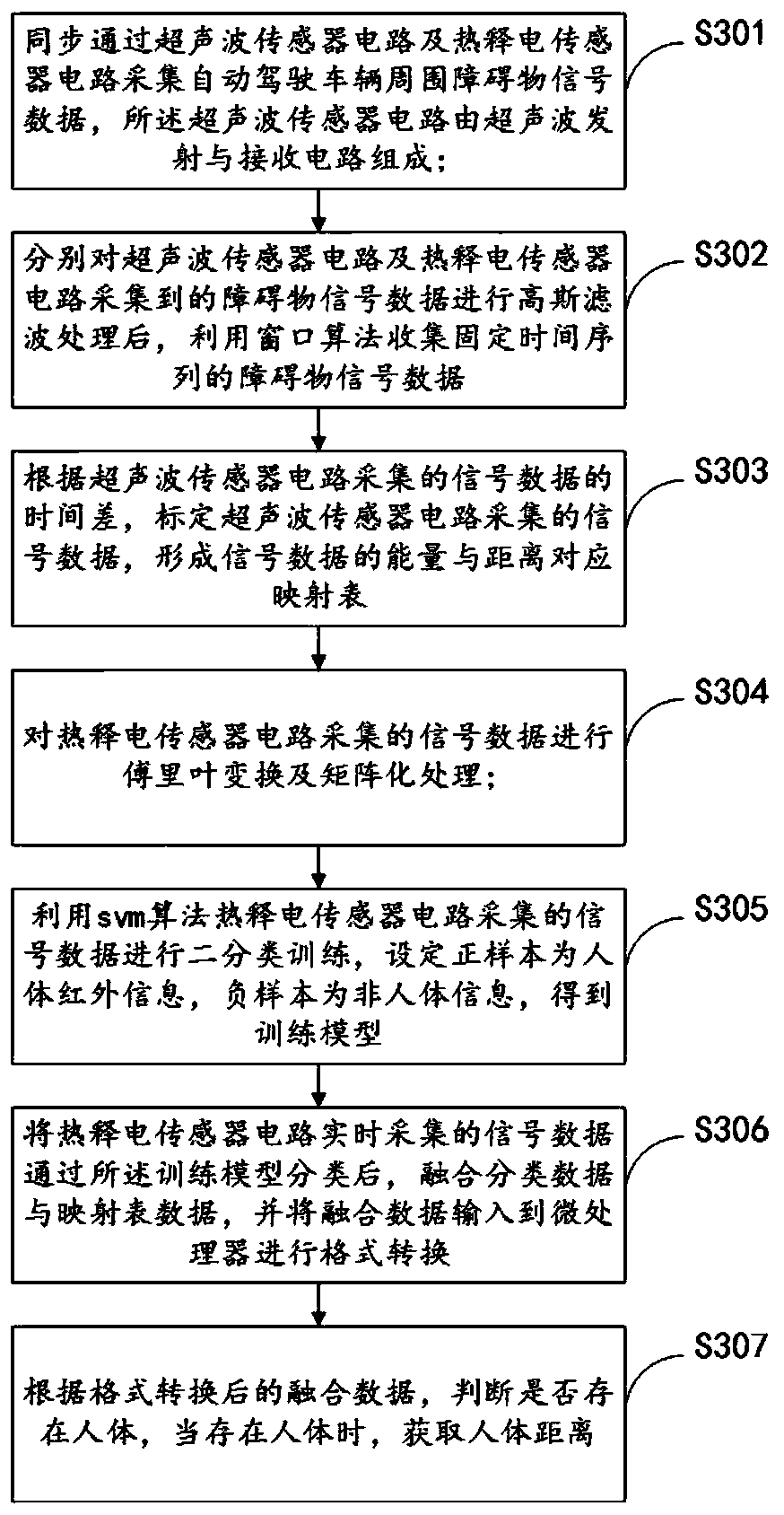
[0052] image 3 The flowchart of the human detection method in automatic driving provided by Embodiment 3 of the present invention includes:
[0053] S1. Synchronously collect signal data of obstacles around the self-driving vehicle through the ultrasonic sensor circuit and the pyroelectric sensor circuit. The ultrasonic sensor circuit is composed of an ultrasonic transmitting and receiving circuit;
[0054] S2. After Gaussian filtering is performed on the obstacle signal data collected by the ultrasonic sensor circuit and the pyroelectric sensor circuit respectively, the obstacle signal data of a fixed time series are collected by using a window algorithm;
[0055] S3, according to the time difference of the signal data collected by the ultrasonic sensor circuit, calibrate the signal data collected by the ultrasonic sensor circuit, and form a mapping table corresponding to the energy and distance of the signal data;
[0056] S4, performing Fourier transform and matrix proces...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More