

A fast adjustment method for multi-axis machine tool servo parameters for consistent closed-loop frequency response
A multi-axis machine tool, fast adjustment technology, applied in the direction of digital control, control/regulation system, program control, etc., can solve the problems of time-consuming and labor-intensive, closed-loop frequency response difference, etc., to reduce the linkage track error, ensure linkage accuracy, save The effect of debugging time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The method of the present invention will be described in detail below in conjunction with the accompanying drawings.
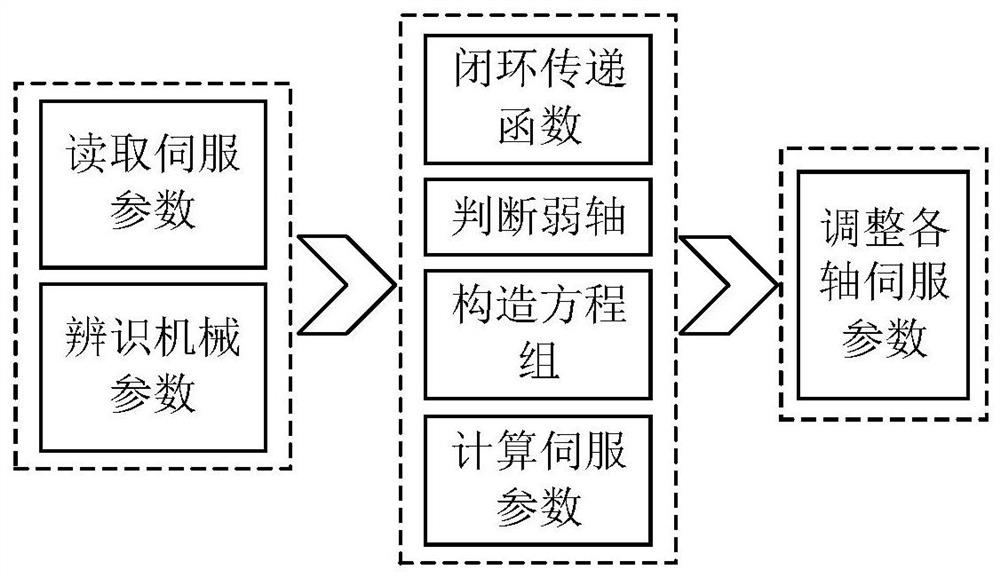
[0039] refer to figure 1 , a method for quickly adjusting servo parameters of a multi-axis machine tool with consistent closed-loop frequency response, including the following steps:
[0040] Step 1: Read the servo parameters of the position loop and speed loop of each feed axis of the machine tool;
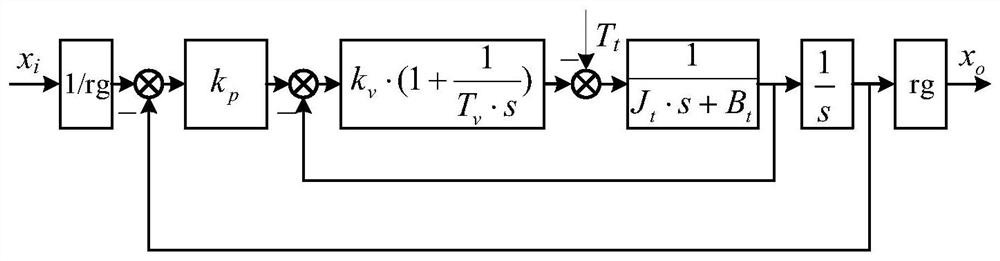
[0041] After each axis has completed the servo parameter debugging with the best servo performance, read the servo parameter value of each axis by consulting the internal parameters of the controller; write its closed-loop transfer function G according to the control structure c_i (s);
[0042] If the feed axis adopts P-PI control, that is, the position controller is a P controller, and the speed controller is a PI controller; the servo parameters of each axis that need to be read are: position loop gain kp_i , speed loop gain k v_i , speed loop integr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More