

Robust stereoscopic vision inertial pre-integration SLAM (Simultaneous Localization and Mapping) method
A stereoscopic vision and pre-integration technology, applied in the field of visual navigation, can solve problems such as imaging noise, hazards, visual solution failure navigation information, etc., and achieve high robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
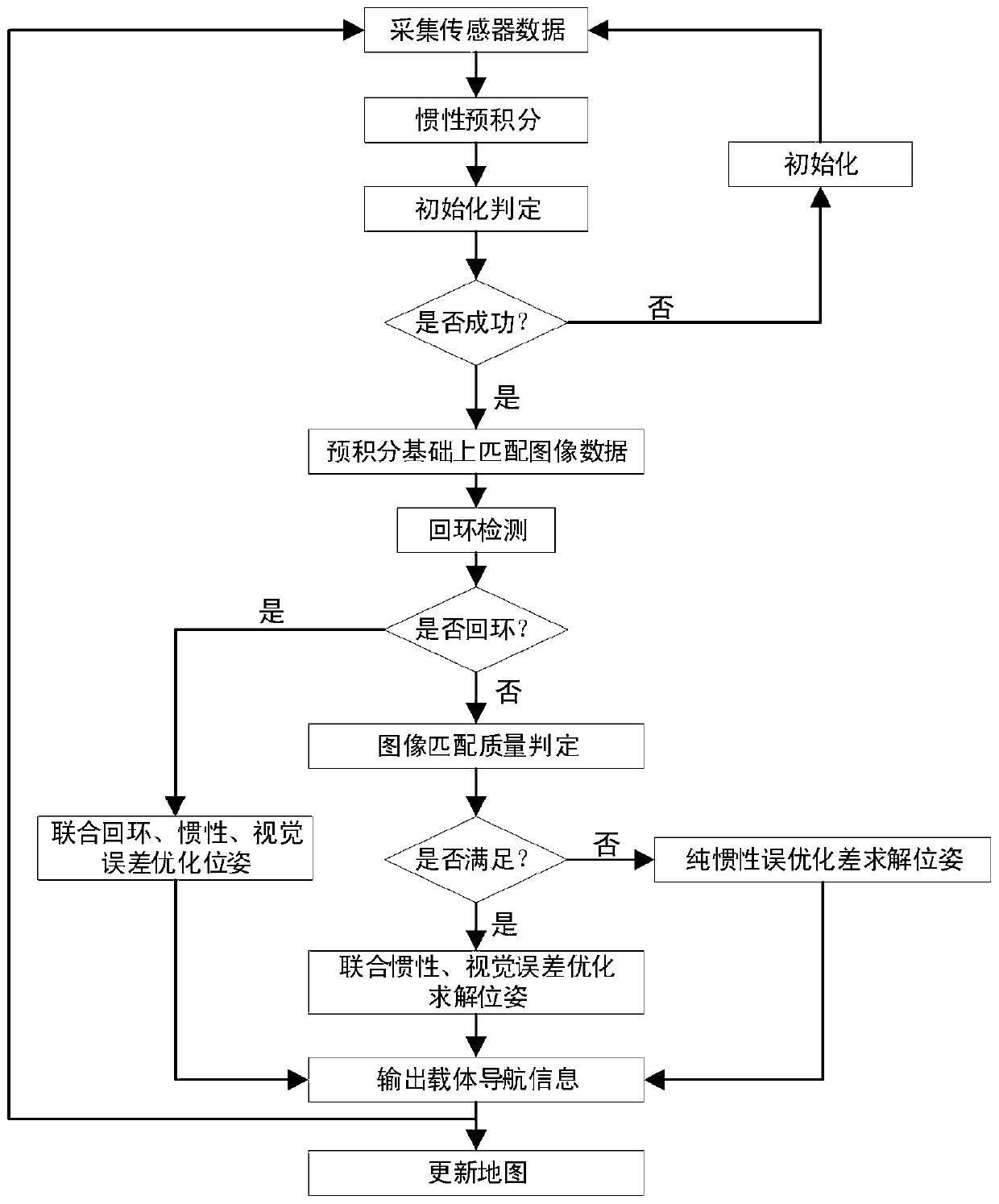
[0063] This embodiment provides a robust stereo vision inertial pre-integration SLAM method, including an inertial sensor and a stereo vision sensor relatively fixedly loaded on a carrier, and the inertia sensor includes an accelerometer and a gyroscope. refer to figure 1 , the working method of the SLAM system comprises the following steps:
[0064] Step 1: Periodically collect accelerometer data at time i Gyroscope data and stereo vision sensor data S(i);
[0065] The visual sensor is a vertical binocular camera or a color and depth (RGB-D) camera, and the visual sensor data collected at moment i in step 1 is point cloud data, and each pixel contains a pixel value and a three-dimensional image in the camera coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More