

Unmanned aerial vehicle energy supply scheduling method based on idle unmanned aerial vehicle replacement
A technology of energy supply and scheduling method, which is applied in the direction of wireless communication, energy consumption reduction, radio transmission system, etc., which can solve the problems of increasing system energy consumption, unavoidable influence of drones, increasing the number of times of system energy supply, etc., to reduce system Effects of energy consumption, guaranteed node service quality, and extended survival time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Embodiments and effects of the present invention are described in further detail below with reference to the accompanying drawings:
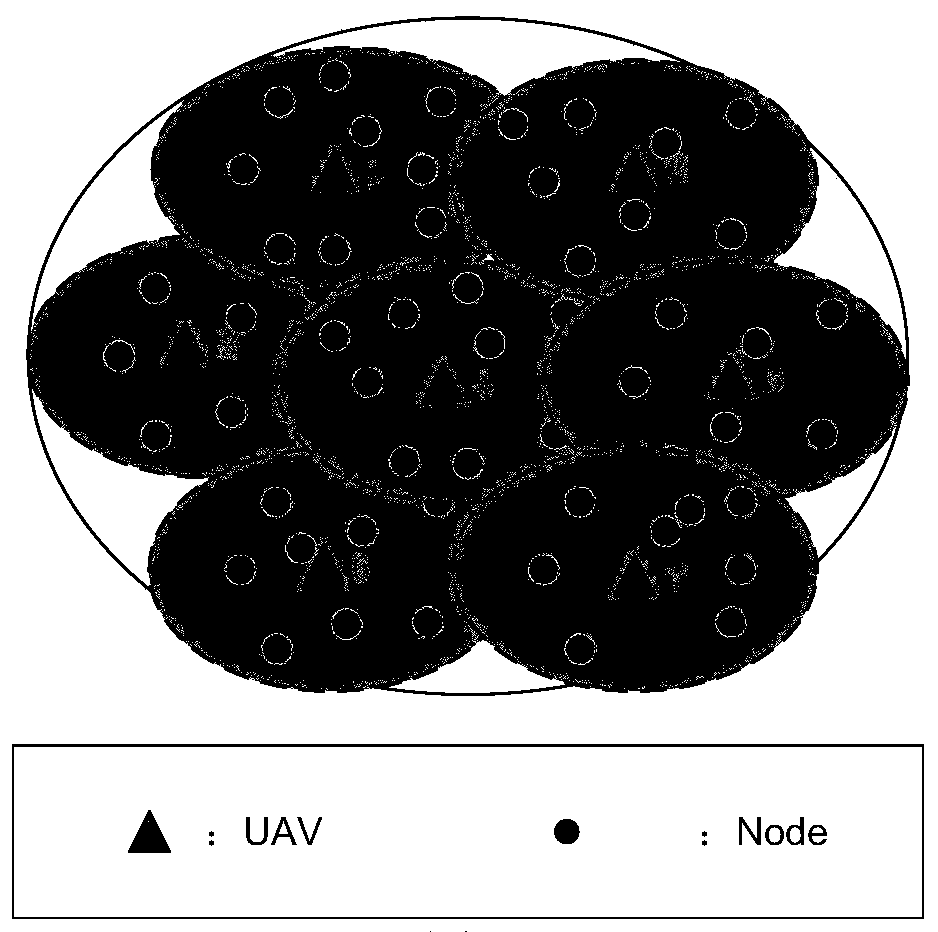
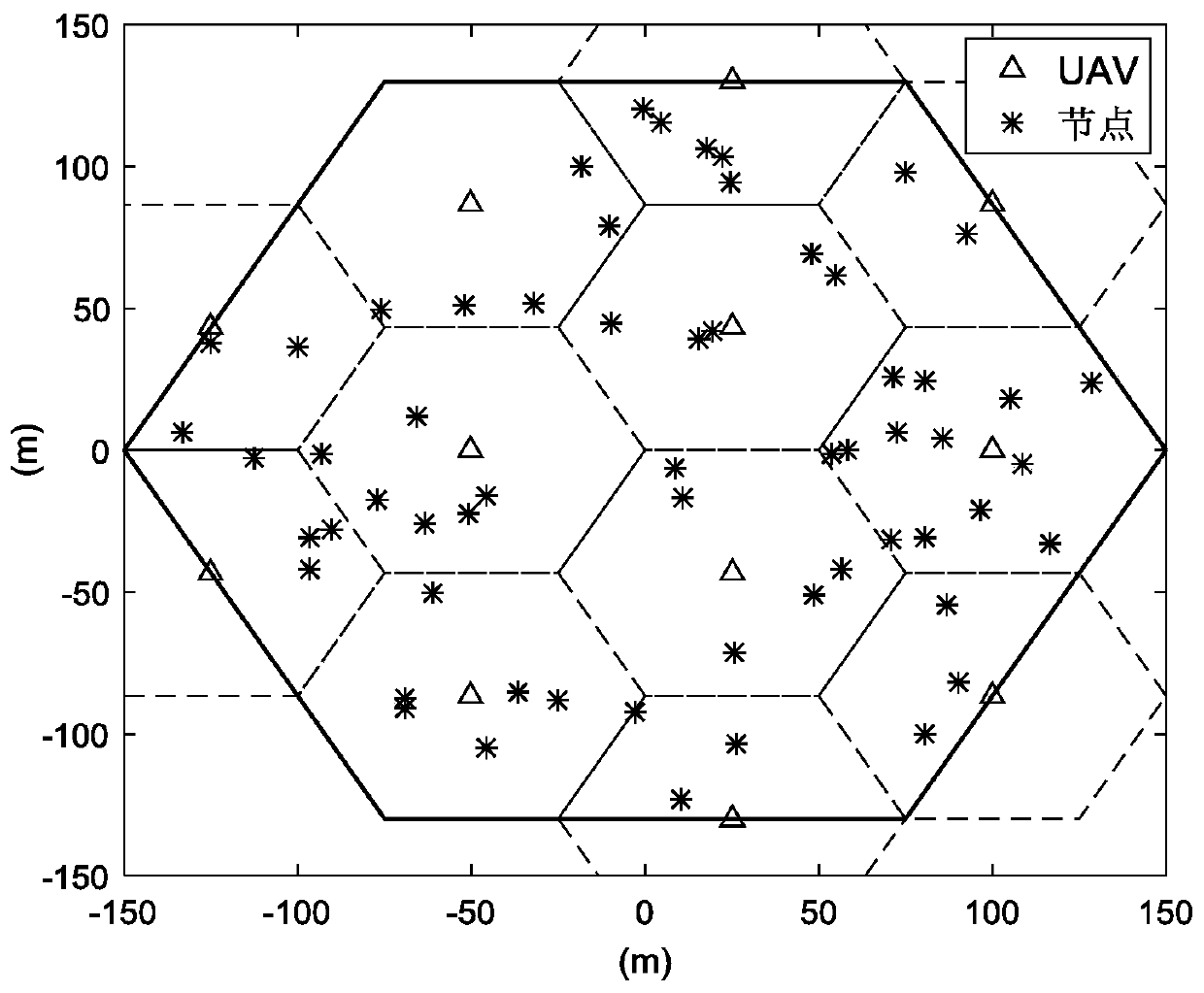
[0041] refer to figure 1 , the application scenario of the present invention is a drone network, which includes 7 drones and 60 nodes. The nodes are randomly distributed within the coverage of the drones, and each node is associated with a drone. The UAV network uses the "graph coloring theory" in graph theory to allocate channels to avoid interference between UAVs.
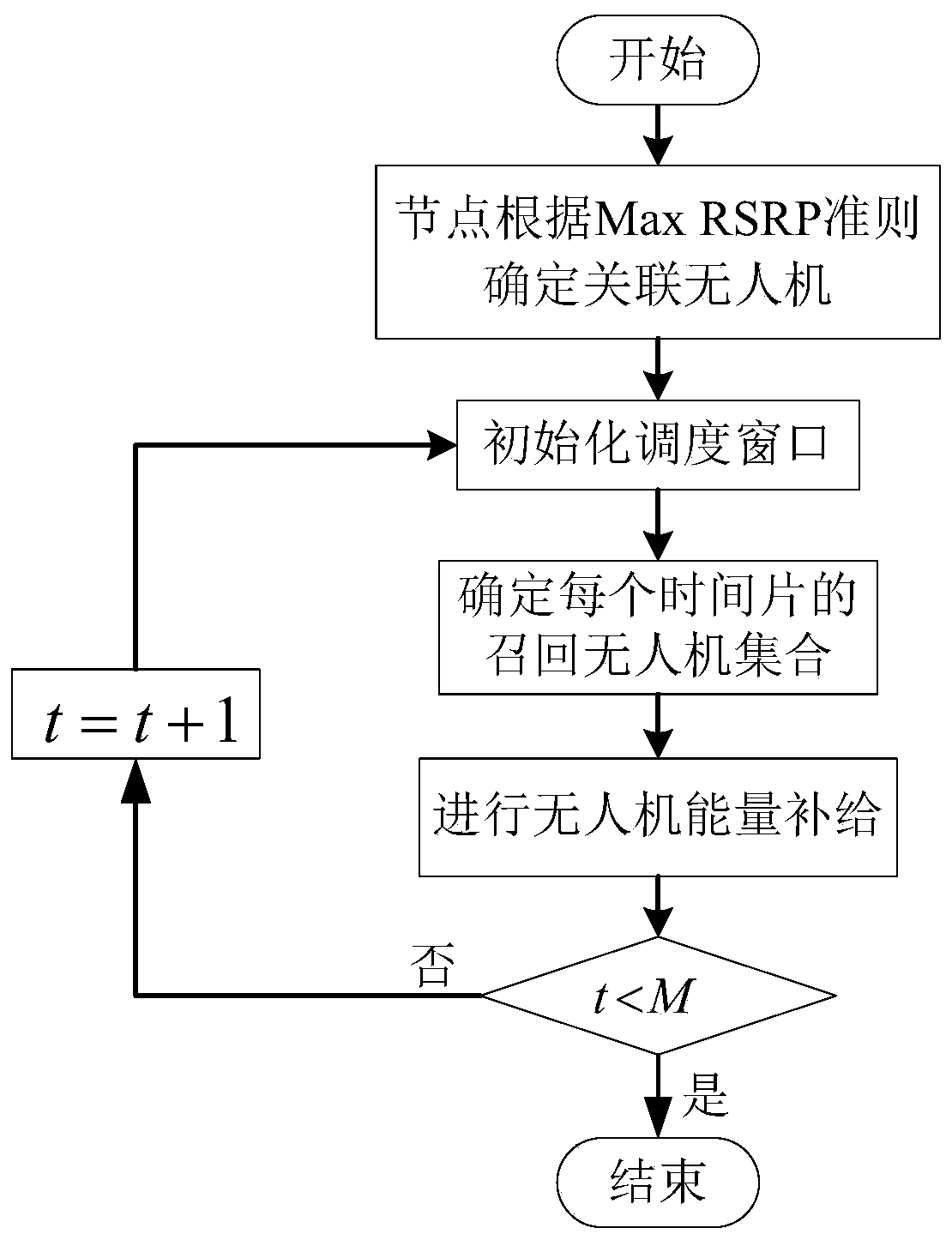
[0042] refer to figure 2 , the specific implementation steps of the present invention are as follows:
[0043] Step 1, initialize the UAV network.
[0044] (1.1) Let the UAV set be V={1,..,k,..,L}, and the ground node set be D={1,...,u,...,A}, where k is UAV serial number, k=1,2,..., L, L is the total number of UAVs providing services in the network, u is the ground node serial number, u=1,2,...,A, A is the total number of nodes in the network, this example takes L=7, A=...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More