

Upper limb exoskeleton mechanical arm and control method of rehabilitation training
An exoskeleton and robotic arm technology, applied in the field of rehabilitation medicine, can solve the problems of narrow application of rehabilitation training trajectory and low accuracy of human body intention recognition.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
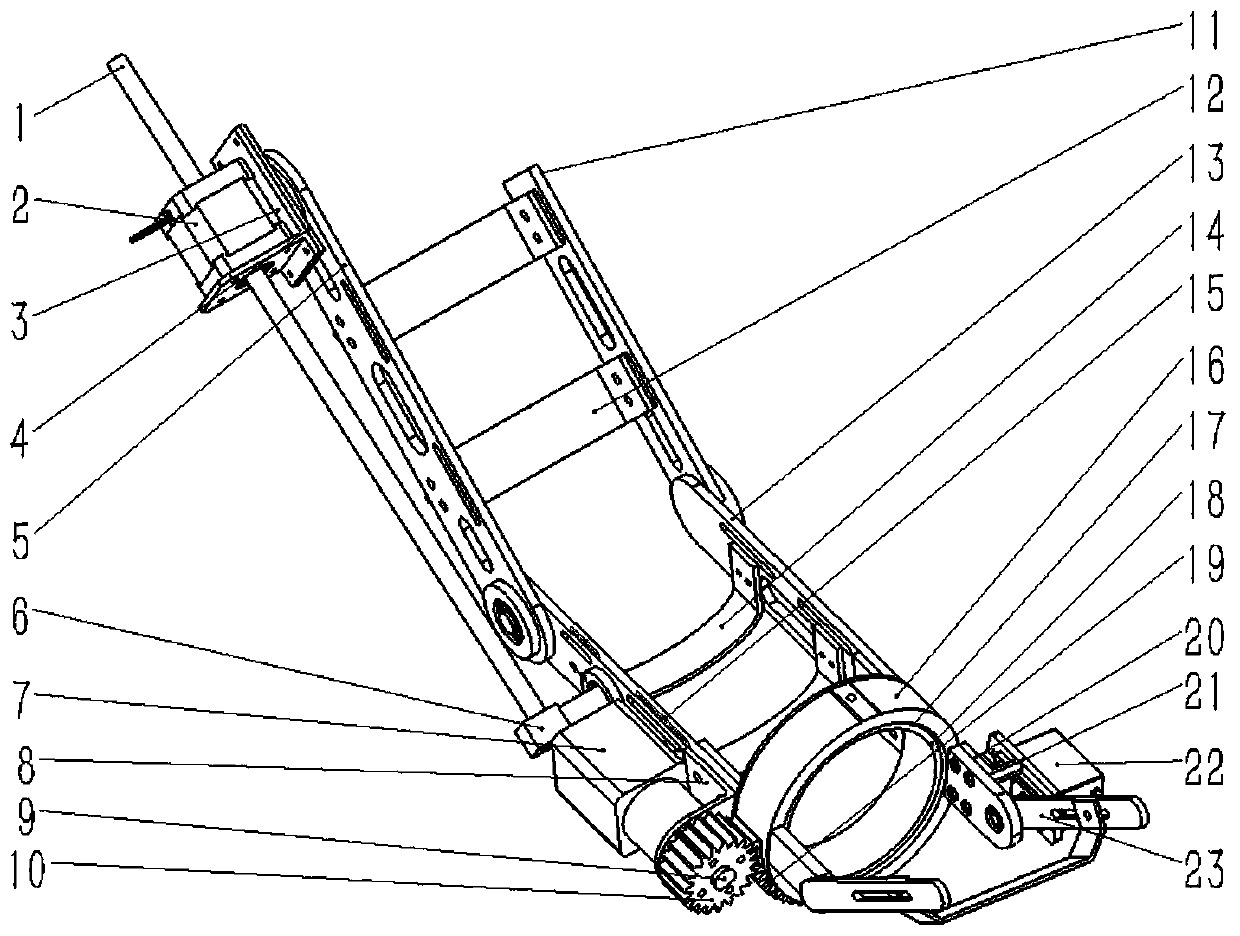
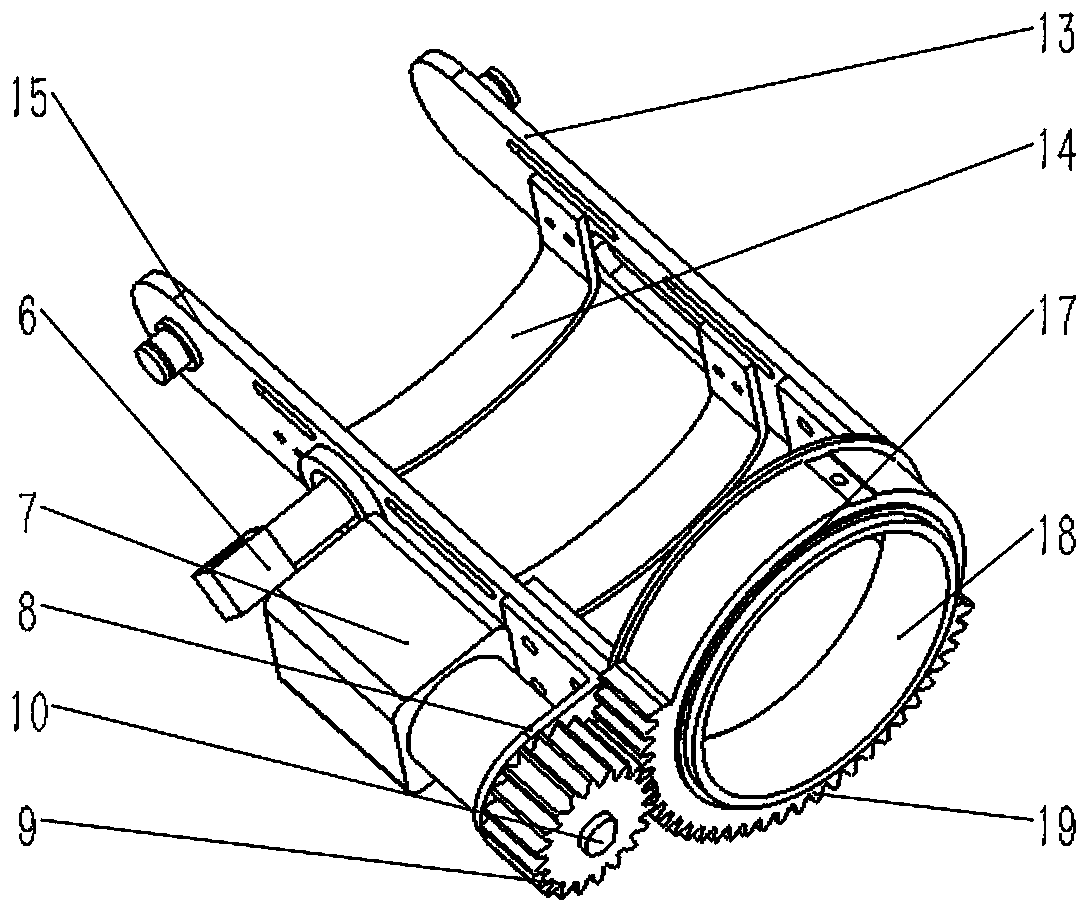
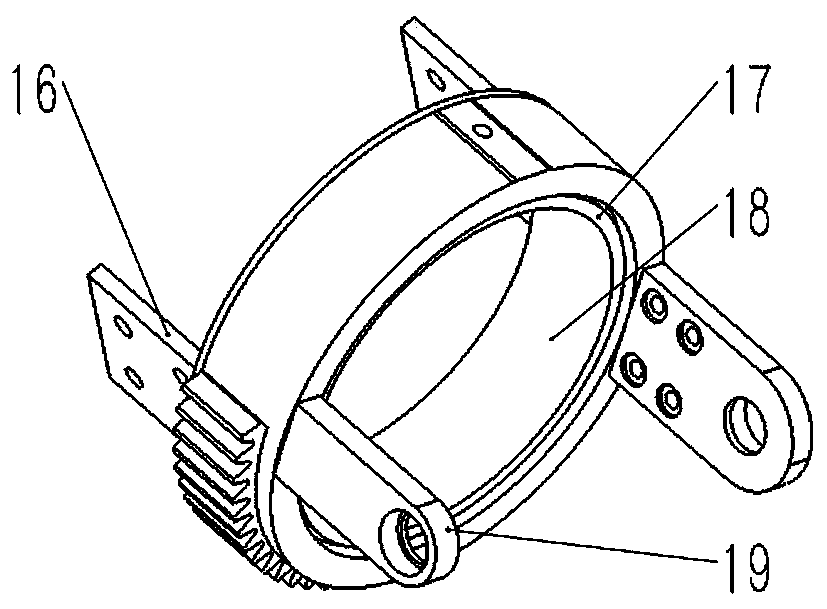
[0088] This embodiment is a three-degree-of-freedom wearable upper limb exoskeleton rehabilitation robot arm, including a connecting rod shaft 1, a linear motor 2, a linear motor frame 3, a connecting plate 4, a big arm outer plate 5, and a damper connecting shaft 6 , stepping motor 7, stepping motor frame 8, stepping motor bushing 9, stepping motor gear 10, inner side plate of the big arm 11, supporting plate of the big arm 12, inner side plate of the small arm 13, supporting plate of the small arm 14, small Arm outer plate 15, wrist outer ring 16, wrist stop ring 17, wrist inner ring 18, wrist gear 19, steering gear connection block 20, steering gear bracket 21, steering gear 22 and hand pull bar 23. There are two respectively of the boom support plates 12 and the forearm support plates 11 . in:
[0089] The wrist stop ring 17 is embedded in a slot at the upper end of the outer circumferential surface of the wrist inner ring 18 . The wrist gear 19 is sleeved on the outer p...
PUM
| Property | Measurement | Unit |
|---|---|---|
| The inside diameter of | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More