

Path planning method, device and system for dynamic storage automatic guide vehicle
A technology for automatic guided vehicles and path planning, applied in the direction of navigation calculation tools, etc., can solve problems such as complex calculations, inability to respond to congestion conditions, and lag, and achieve low calculation difficulty, shorten task execution time, and ensure legality Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
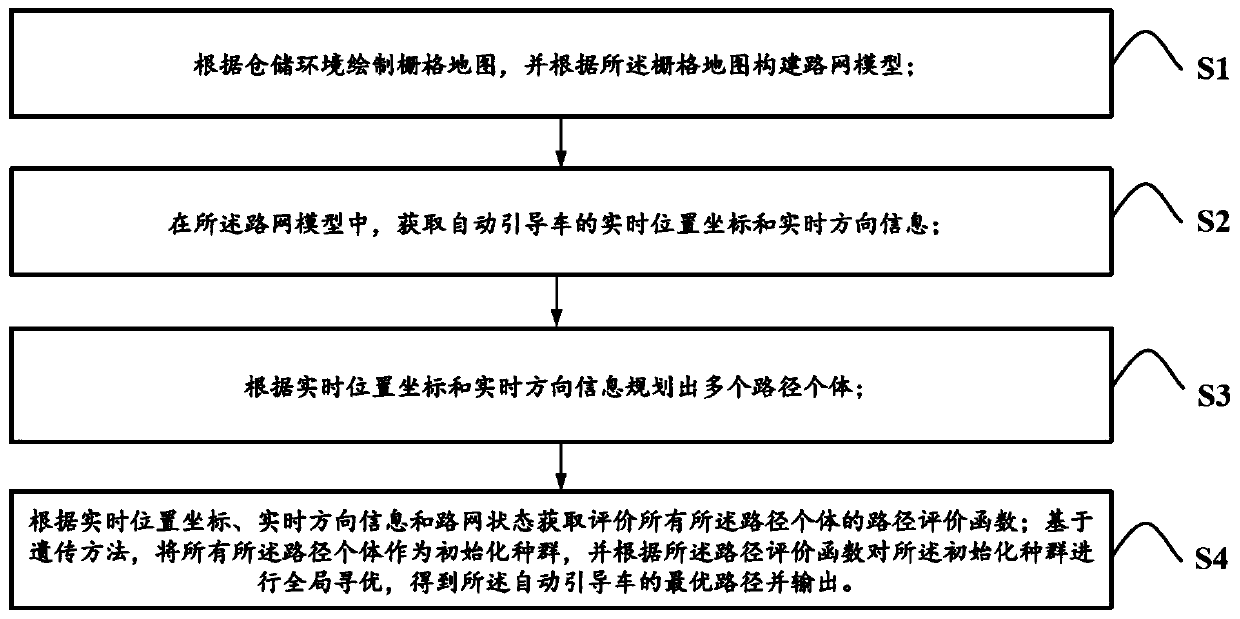
[0093] Embodiment one, as figure 1 As shown, a path planning method for dynamic storage automatic guided vehicles includes the following steps:
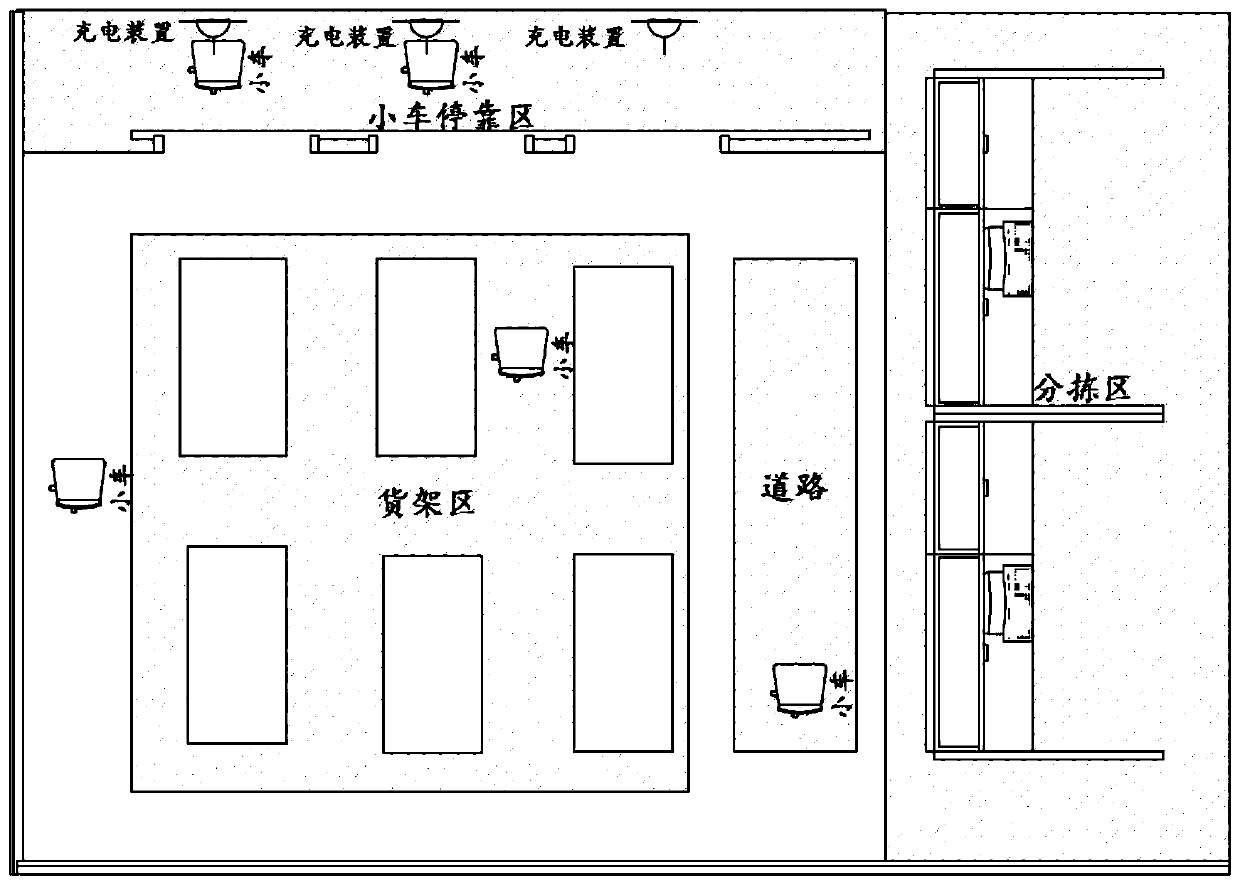
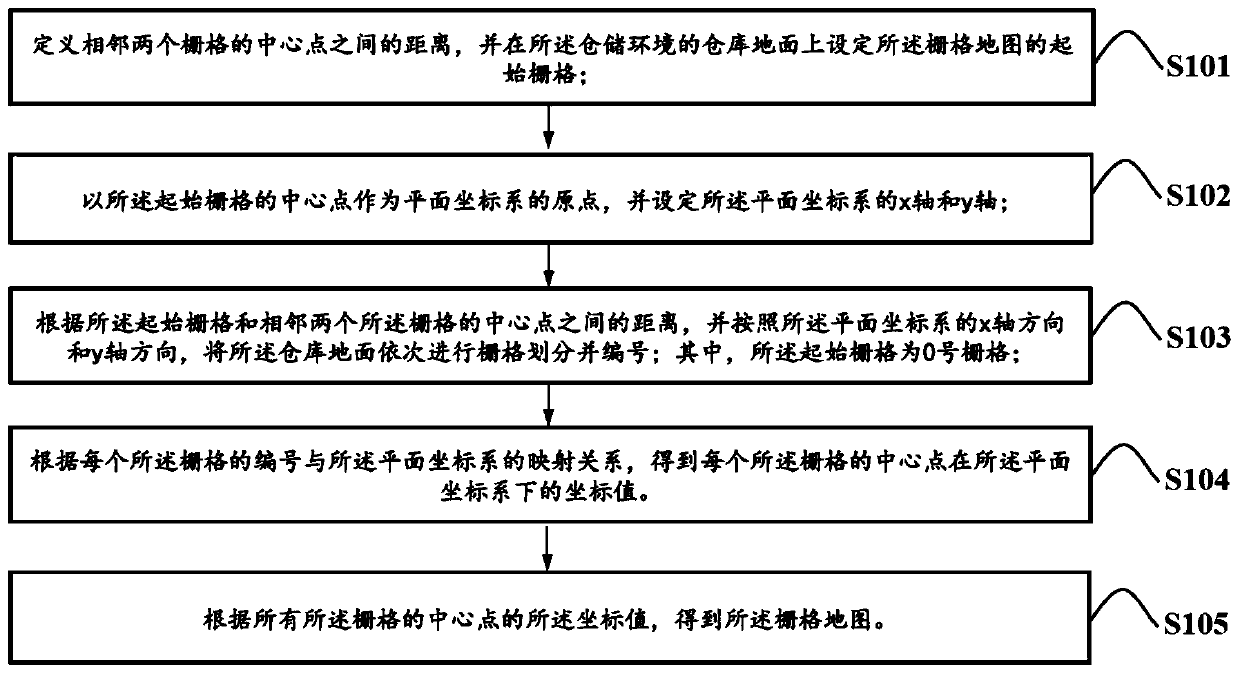
[0094] S1: draw a grid map according to the storage environment, and construct a road network model according to the grid map;
[0095] S2: In the road network model, obtain the position coordinates and direction information of the automatic guided vehicle;
[0096] S3: Planning a plurality of path individuals according to the real-time position coordinates and the real-time direction information;
[0097] S4: According to the real-time position coordinates, the real-time direction information and the state of the road network, obtain the route evaluation function for evaluating all the route individuals; based on the genetic method, use all the route individuals as the initialization population, and evaluate according to the route The function performs global optimization on the initialization population, obtains the optimal path ...
Embodiment 2
[0156] Embodiment two, such as Figure 15 As shown, a path planning device for a dynamic storage automatic guided vehicle is applied in Embodiment 1 figure 1 The steps from S1 to S5 of the path planning method for the dynamic storage automatic guided vehicle shown include a drawing and modeling module, a position acquisition module, a direction acquisition module, a path planning module and a path optimization module;
[0157] The drawing and modeling module is used to draw a grid map according to the storage environment, and construct a road network model according to the grid map;
[0158] The position obtaining module is used to obtain the position coordinates of the automatic guided vehicle in the road network model;
[0159] The direction obtaining module is used to obtain the direction information of the automatic guided vehicle in the road network model;
[0160] The path planning module is configured to plan a plurality of individual paths according to the real-time ...
Embodiment 3
[0164] Embodiment 3. A path planning device for a dynamic storage automatic guided vehicle, including a processor, a memory, and a computer program stored in the memory and operable on the processor. The computer program implements the embodiment when running one middle school figure 1 Steps S1 to S5 of the path planning method for the dynamic storage automatic guided vehicle shown.
[0165] The path planning device for dynamic storage automatic guided vehicles in this embodiment has low calculation difficulty and fast convergence speed, and the optimal path obtained can avoid congested areas, respond to congested situations in a timely manner, shorten task execution time, and make intelligent warehousing operate more efficiently.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More