

Pneumatic soft actuator and manufacturing method thereof
A technology of actuators and software, applied in the direction of manufacturing tools, program control manipulators, manipulators, etc., can solve the problems of high energy consumption, high air pressure, etc., and achieve the effect of good unfolding motion performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
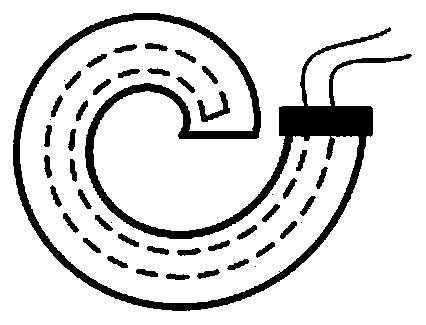
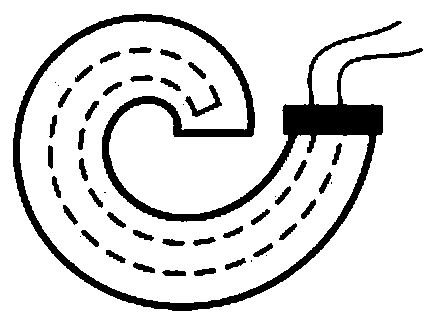
[0035] There are various spiral biological configurations in nature, such as nautilus, currency bug, plant vines, seahorse tail[17], etc. Among them, the tail of the seahorse usually maintains a logarithmic spiral configuration. When the hippocampus tries to catch When objects such as seaweed and coral resist the impact of seawater, the tail will first unfold and then bend to embrace the object; objects such as record grooves, mosquito coils, and cams in life are also in a spiral configuration. Most of the configurations of these creatures or objects conform to spiral configurations such as Archimedes spiral or logarithmic spiral.
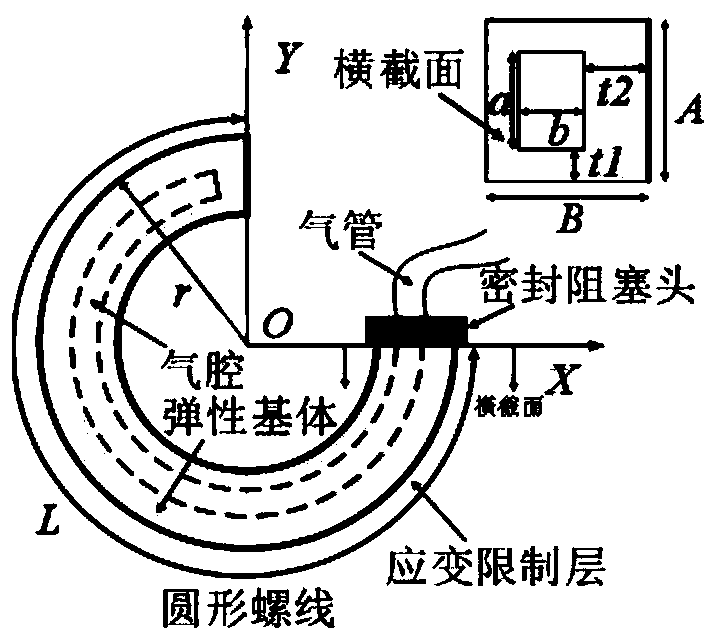
[0036] Inspired by this, this application conducts research on the design scheme and working method of the pneumatic soft actuator with a helical configuration, and proposes the following implementation methods, which are now described as follows:
[0037] Helical actuator structure:
[0038] According to the basic knowledge of analytic geometry, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More