

Multi-agent system motion control method based on improved physicomimetics
A technology of mimic physics and motion control, applied in non-electric variable control, two-dimensional position/channel control, position/direction control and other directions, it can solve problems such as boundary oscillation, and achieve the effect of increasing speed and consistent force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solution of the present invention is described in detail in combination with the accompanying drawings.
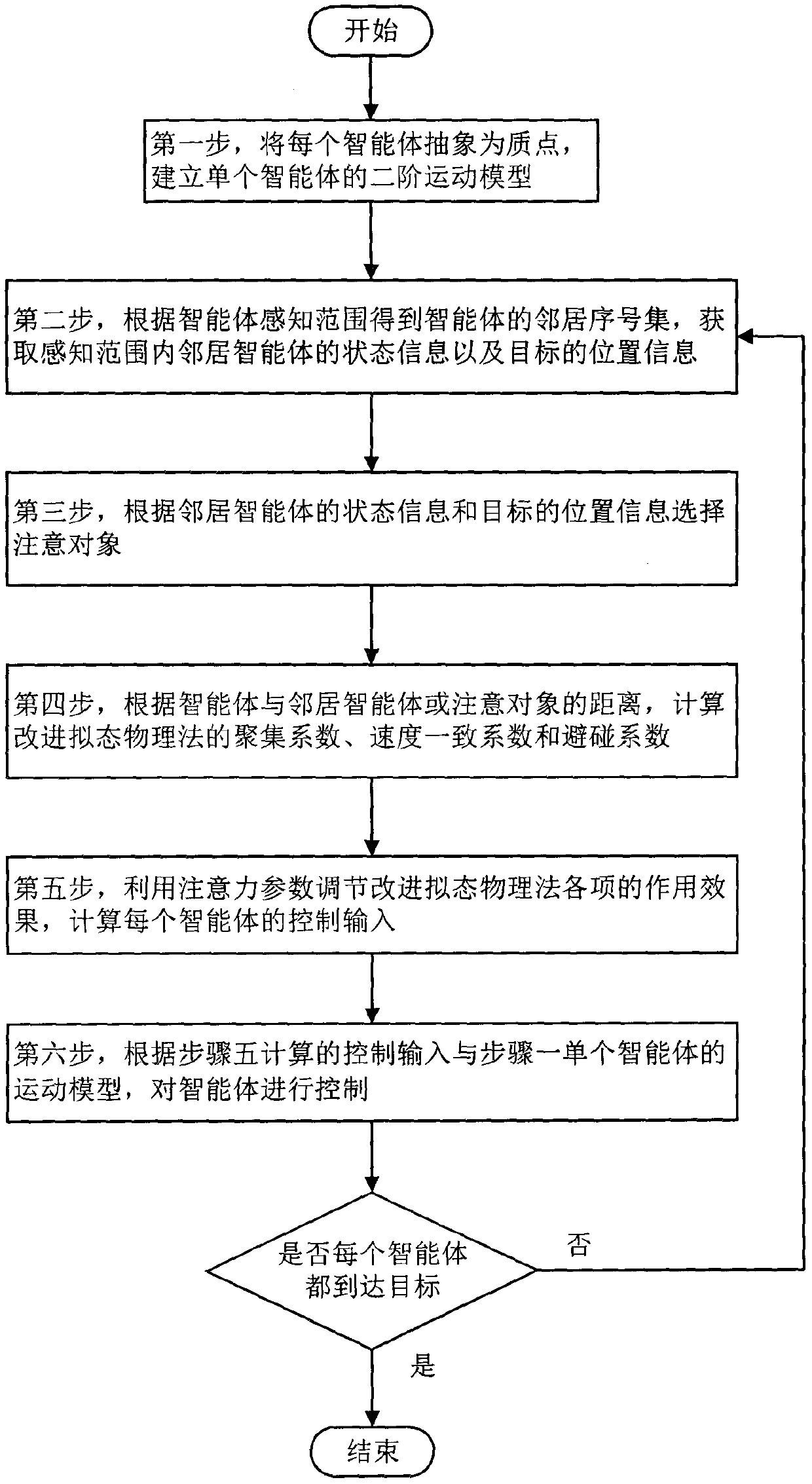
[0028] Such as figure 1 As shown, a kind of multi-agent system motion control method based on improved mimic physics method of the present invention, specifically comprises the following steps:
[0029] Step 1: Abstract each agent as a particle, and establish a second-order motion model of a single agent. The specific process is:
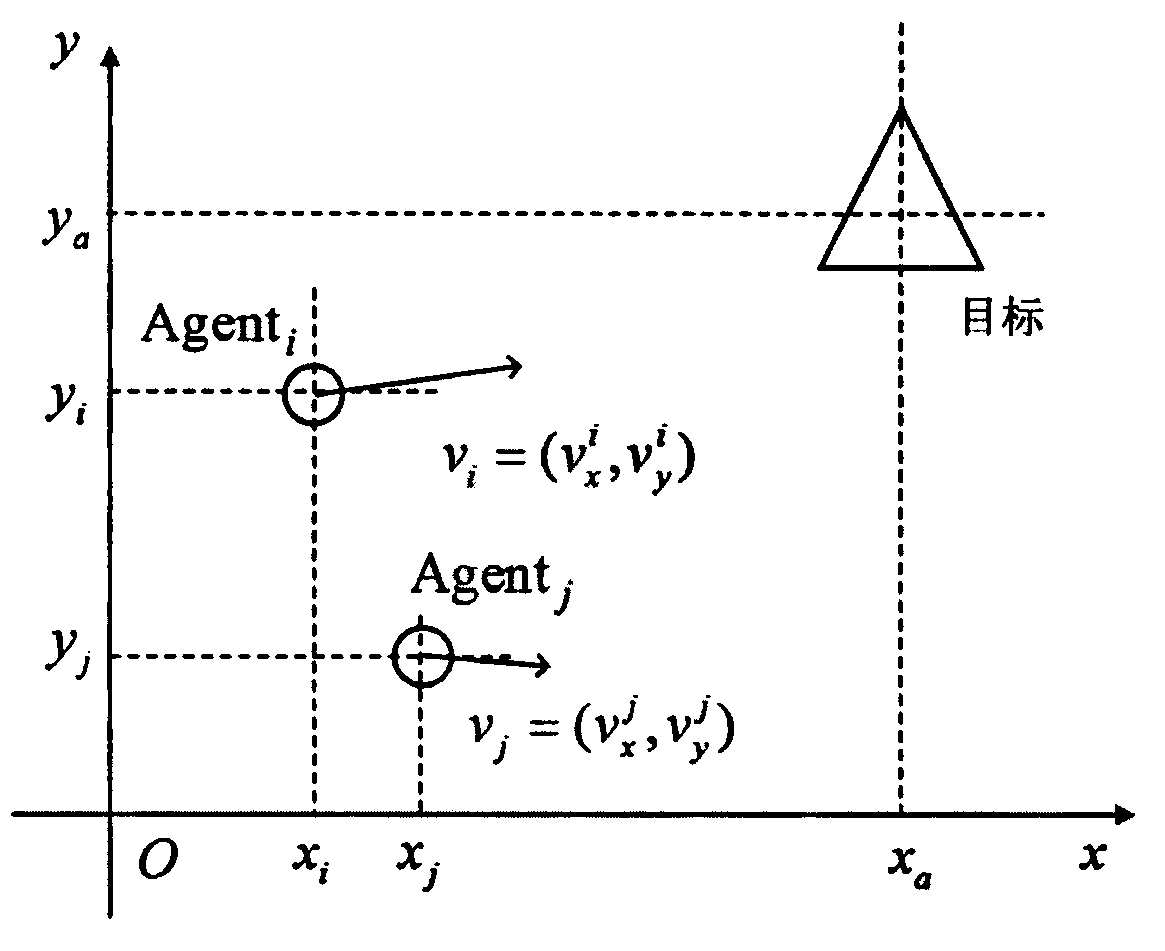
[0030] Establish a Cartesian coordinate system for the environment where the agent is located, such as figure 2 As shown in , the circle in the figure represents the agent, the triangle represents the target, and the velocity vector is represented by the arrow. Agent i at position p in the environment i =(x i ,y i ), at a speed of The location of the target is A single agent is abstracted as a particle, and its motion model is:
[0031]
[0032] In the formula, p i is the agent i The position vector of v i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More