

Landing segment robust fusion method based on multi-beam ranging, velocity measurement and inertia
A fusion method, multi-beam technology, applied in the direction of measuring device, surveying and navigation, navigation through speed/acceleration measurement, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
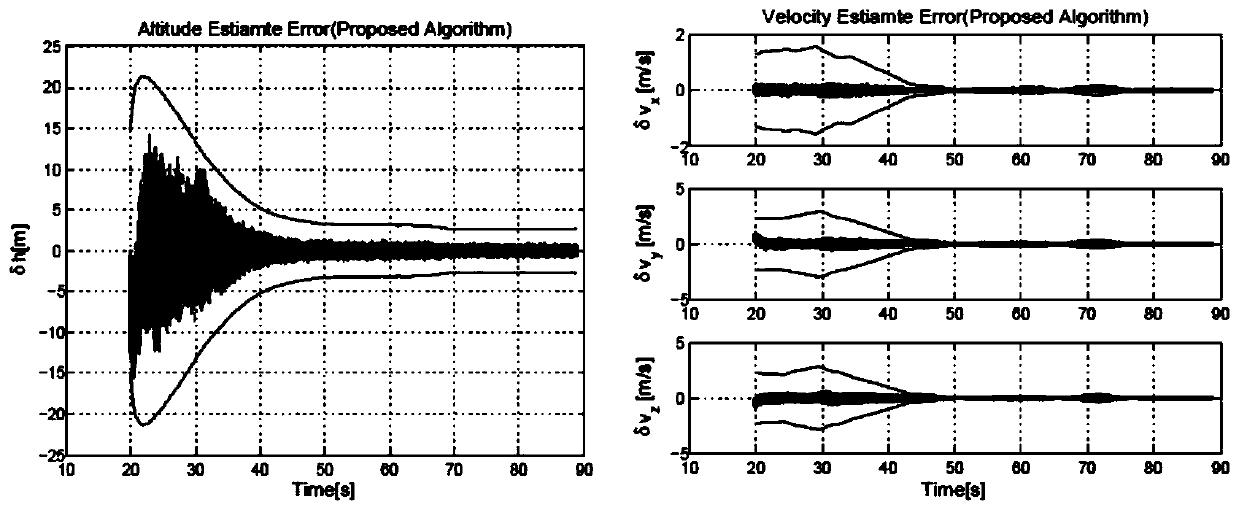
[0053] The present invention provides a robust fusion method for the landing segment based on multi-beam ranging, velocity and inertia for the ranging and velocity correction process of the Mars landing segment. Implement robust estimation. And considering on-board computing constraints, real-time estimation is realized, including the following steps:
[0054] (1) Ranging correction
[0055] (11) Establish the second-order dynamic equation of altitude-vertical velocity according to the inertial navigation equation.
[0056] (12) Use the attitude information to calculate the height according to the measurement of each beam, and use the height as a virtual observation
[0057] (13) According to the altitude predicted by the inertial navigation, the vertical velocity and the distance measurement, the altitude is obtained, and the linear unified equation is obtained, and the optimal unbiased estimation of the altitude and the vertical velocity can be obtained by using the minimu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More