

Vehicle anti-collision pre-judging method and device, equipment and readable storage medium
An anti-collision and vehicle technology, which is applied in the field of vehicle anti-collision prediction methods, devices, equipment and readable storage media, can solve the problems of unpredictability, unmanned vehicles too late to stop, etc., so as to avoid traffic accidents and improve the level of intelligence Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
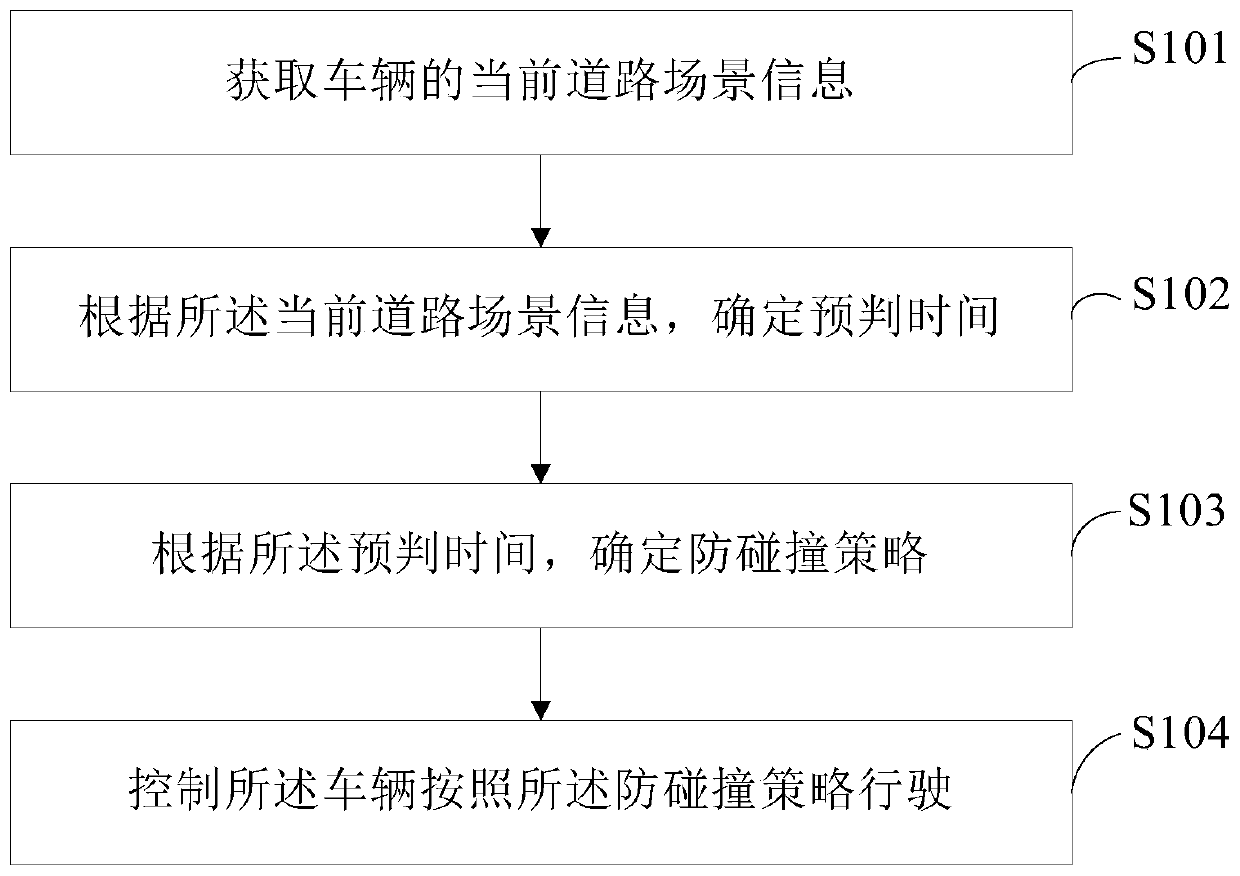
[0072] figure 2 The flow chart of the vehicle anti-collision prediction method provided in Embodiment 1 of the present application, such as figure 2 As shown, the execution subject of the embodiment of the present application is the vehicle anti-collision prediction device, and the vehicle anti-collision prediction device can be integrated in the automatic driving system. Then the vehicle anti-collision prediction method provided in this embodiment includes the following steps:
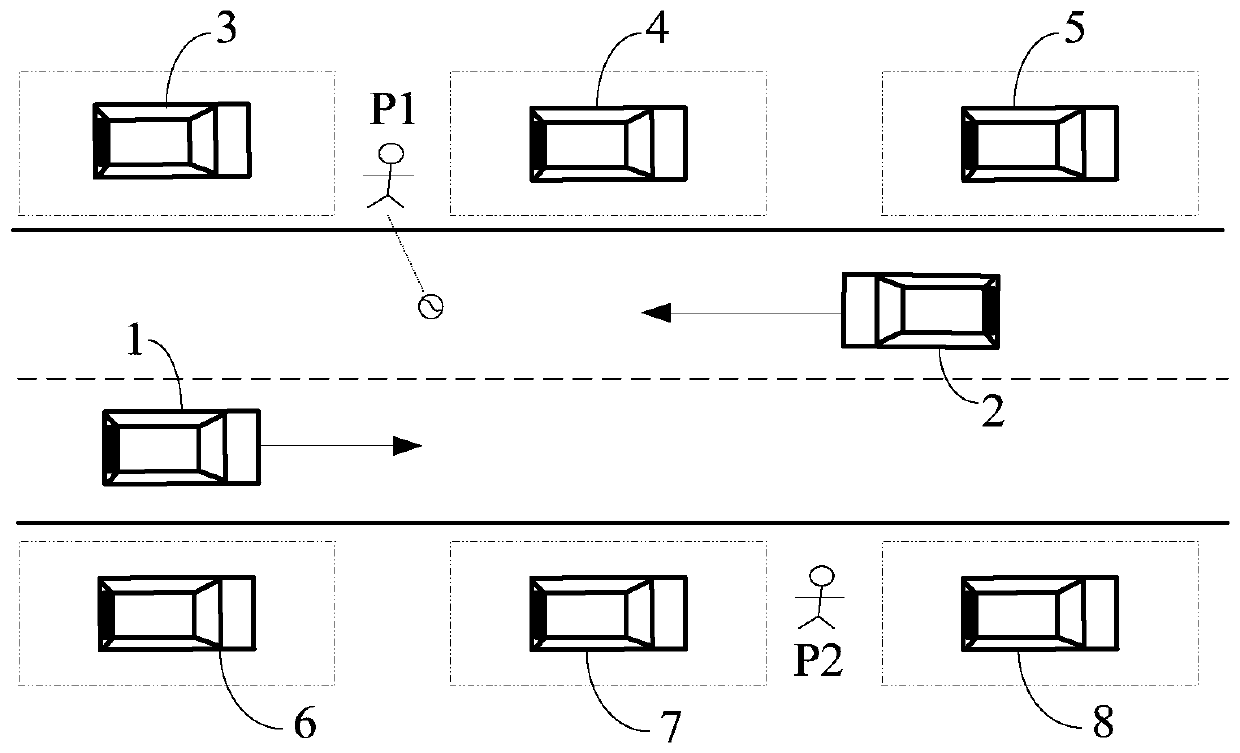
[0073] S101. Obtain current road scene information of the vehicle.
[0074] Specifically, the self-driving vehicle driving on the current road can obtain and recognize the current road scene information in real time through the configured camera, millimeter-wave radar and / or lidar and other sensing devices, and the current road scene information can include parking on the roadside Vehicle or obstacle information, motion posture information of a ball rolling on the road or other obstacles that may ...
Embodiment 2
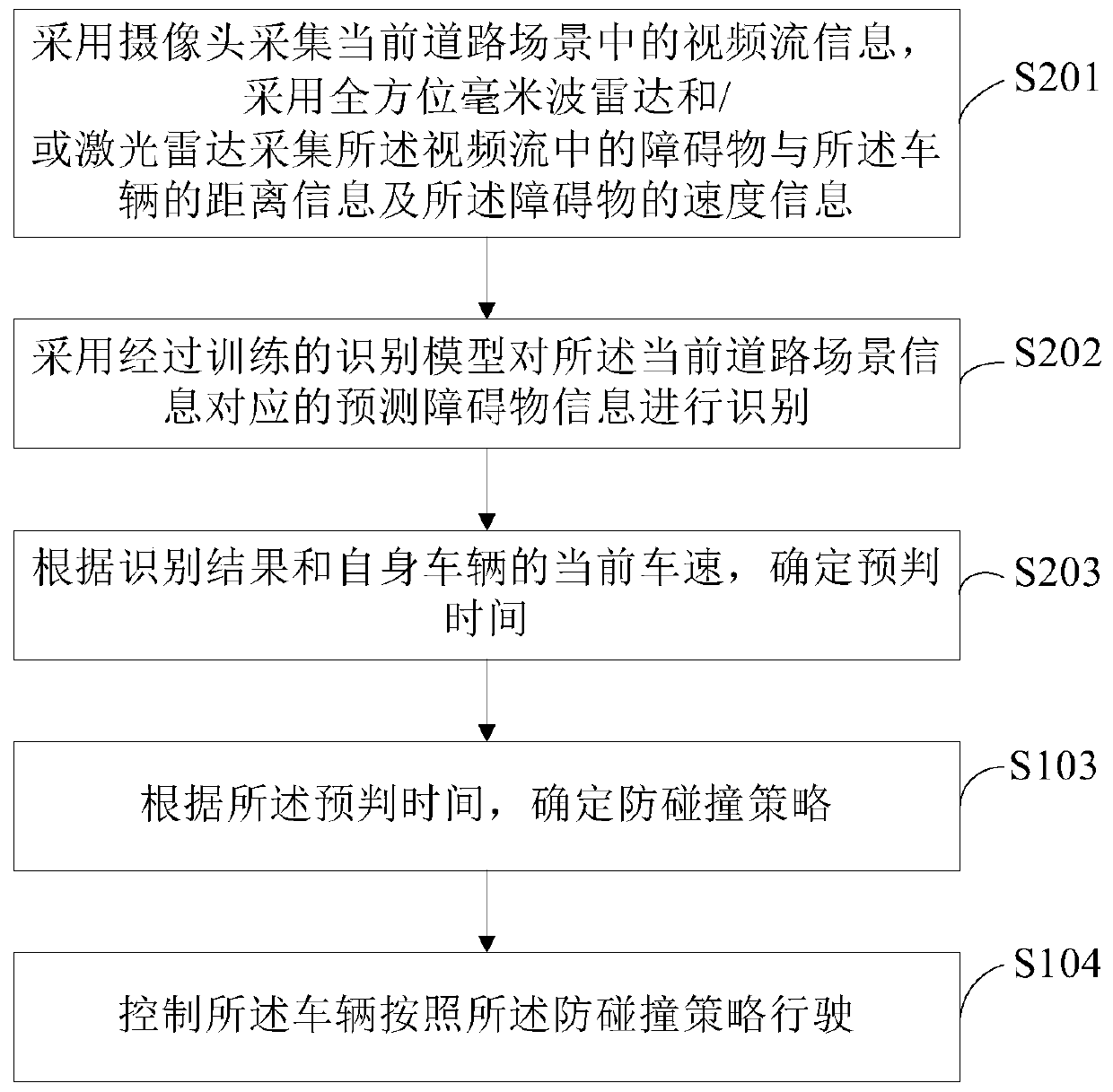
[0084] image 3 The flow chart of the vehicle anti-collision prediction method provided in Embodiment 2 of the present application, such as image 3 As shown, the vehicle anti-collision prediction method provided in this embodiment is based on the method embodiment 1 of the present application and further refines steps S101-S104. The method provided in this embodiment includes the following steps:
[0085] S201. Use a camera to collect video stream information in the current road scene, and use omnidirectional millimeter-wave radar and / or lidar to collect distance information between an obstacle in the video stream and the vehicle and speed information of the obstacle.
[0086] Specifically, the self-driving vehicle driving on the current road can obtain and identify the current road scene information in real time through the configured camera, millimeter-wave radar and / or lidar and other sensing devices, such as using the camera to collect video streams in the current road sc...
Embodiment 3
[0105] Figure 4 The schematic structural diagram of the vehicle anti-collision prediction device provided in Embodiment 3 of the present application, as shown in Figure 4 As shown, the device provided in this embodiment includes:
[0106] The scene acquiring module 410 is used to acquire the current road scene information of the vehicle.
[0107] The time determination module 420 is configured to determine the predicted time according to the current road scene information.
[0108] A strategy determining module 430, configured to determine an anti-collision strategy according to the predicted time.
[0109] A control module 440, configured to control the vehicle to run according to the collision avoidance strategy.
[0110] The device provided in this embodiment can perform figure 2 The implementation principles and technical effects of the technical solutions of the shown method embodiments are similar and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More