

Joint control method of electric power steering system and differential power system for four-wheel independent-drive electric automobile
An electric power steering, four-wheel independent drive technology, applied in the direction of electric steering mechanism, power steering mechanism, steering mechanism, etc., can solve the problems of being too sensitive, unable to judge the stability of the car, and the driver cannot feel the road feeling, etc. Steering stability, quick and light steering effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
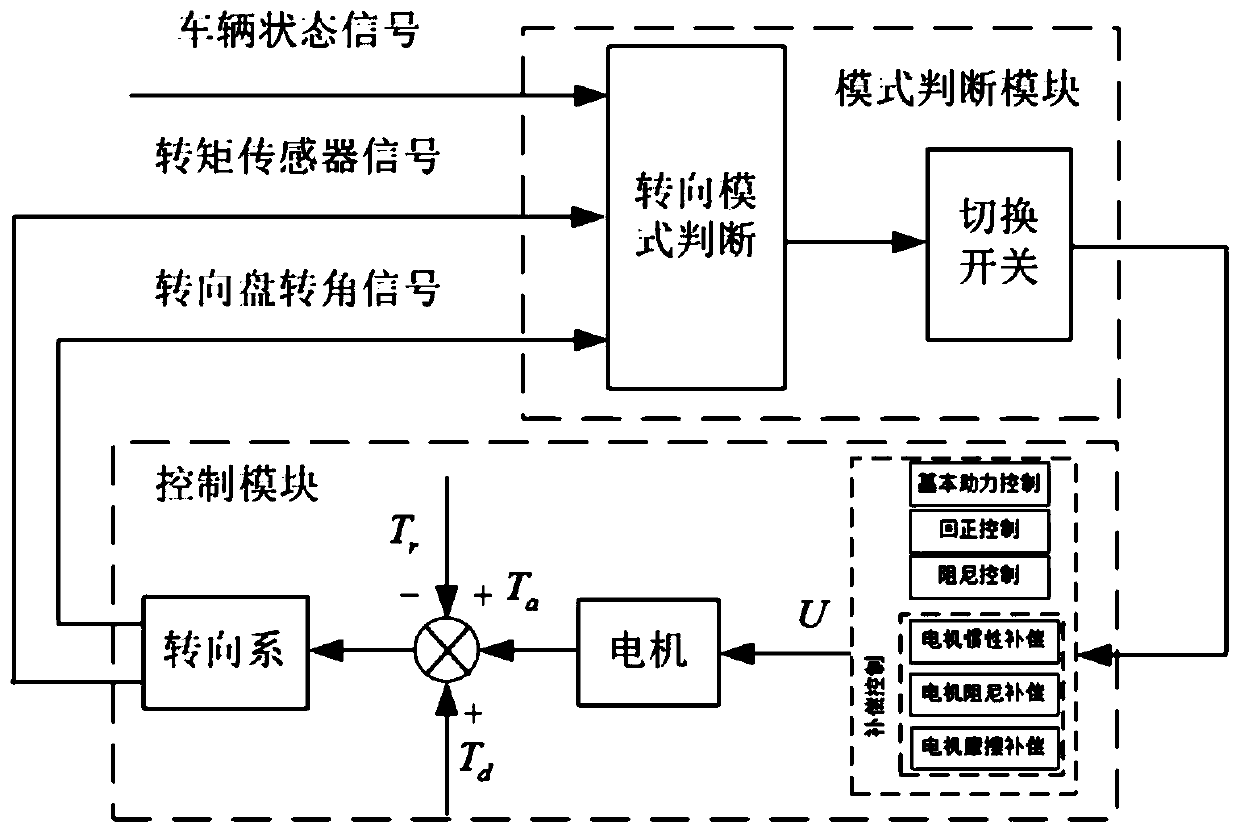
[0041] Such as Figure 1-9 As shown, the present invention provides a joint control method for an electric power steering system and a differential power assist system of a four-wheel independently driven electric vehicle. By monitoring the steering wheel torque and vehicle speed of the vehicle during driving, the current of the power assist motor is controlled. The steering wheel is assisted under different steering wheel torques and car speeds, making the car turn light and fast, and improving the steering stability of the car.
[0042] During the driving process of the car, when the car turns, the torque sensor detects the torque signal, compares the steering wheel torque signal with the steering wheel input torque when the system starts to assist, if the steering wheel to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More