

Self-oriented large-fault-tolerance isomorphic interface for spacecraft and using method thereof
A self-guided, spacecraft technology, which is applied to the docking device of space navigation vehicle, space navigation aircraft, aircraft and other directions, can solve the problems of poor docking fault tolerance and increase the difficulty of control of space manipulators, and achieves simple control, compact size, The effect of saving task cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
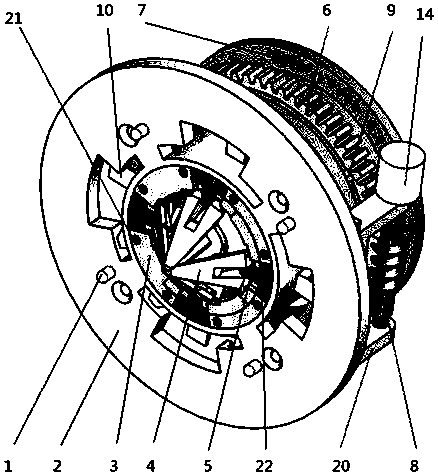
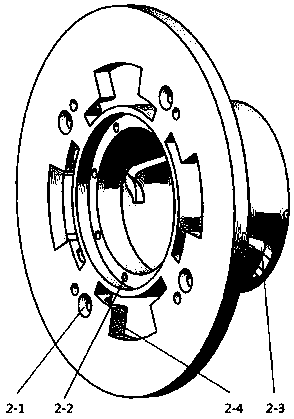
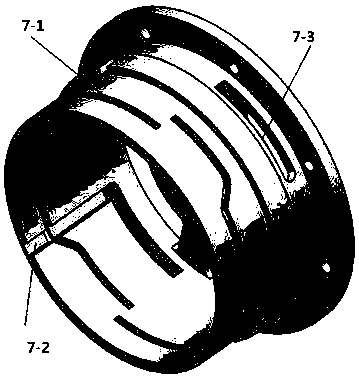
[0033] Such as Figure 1 to Figure 8 As shown, a large fault-tolerant self-guiding isomorphic interface for a spacecraft includes: a guiding mechanism, a positioning mechanism, a locking mechanism, a transmission mechanism, a support seat (20) and a motor (14); wherein, the guiding mechanism includes: a guiding tapered hole (3), guide plate (4), guide plate connecting plate (5), guide plate push rod (13), guide plate drive rod (11) and rotating pin (12), inner drum (15), locking thread Group (21), guide thread group (22); positioning mechanism includes: locking positioning pin (1), positioning pin baffle plate (17), set screw (18); locking mechanism includes: telescopic sleeve (10), Drive rod (16), locking sleeve (2); transmission mechanism includes: worm gear (6), worm screw (8), worm gear key (9), support sleeve (7), transmission bolt group (19).
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More