Movement bionic mechanism for simulating jumper jumping device and jumping method of movement bionic mechanism
A jumper jumper and movement technology, applied in the field of robotics, can solve problems that have not been studied before, and achieve the effects of strong environmental adaptability, clear movement principle, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
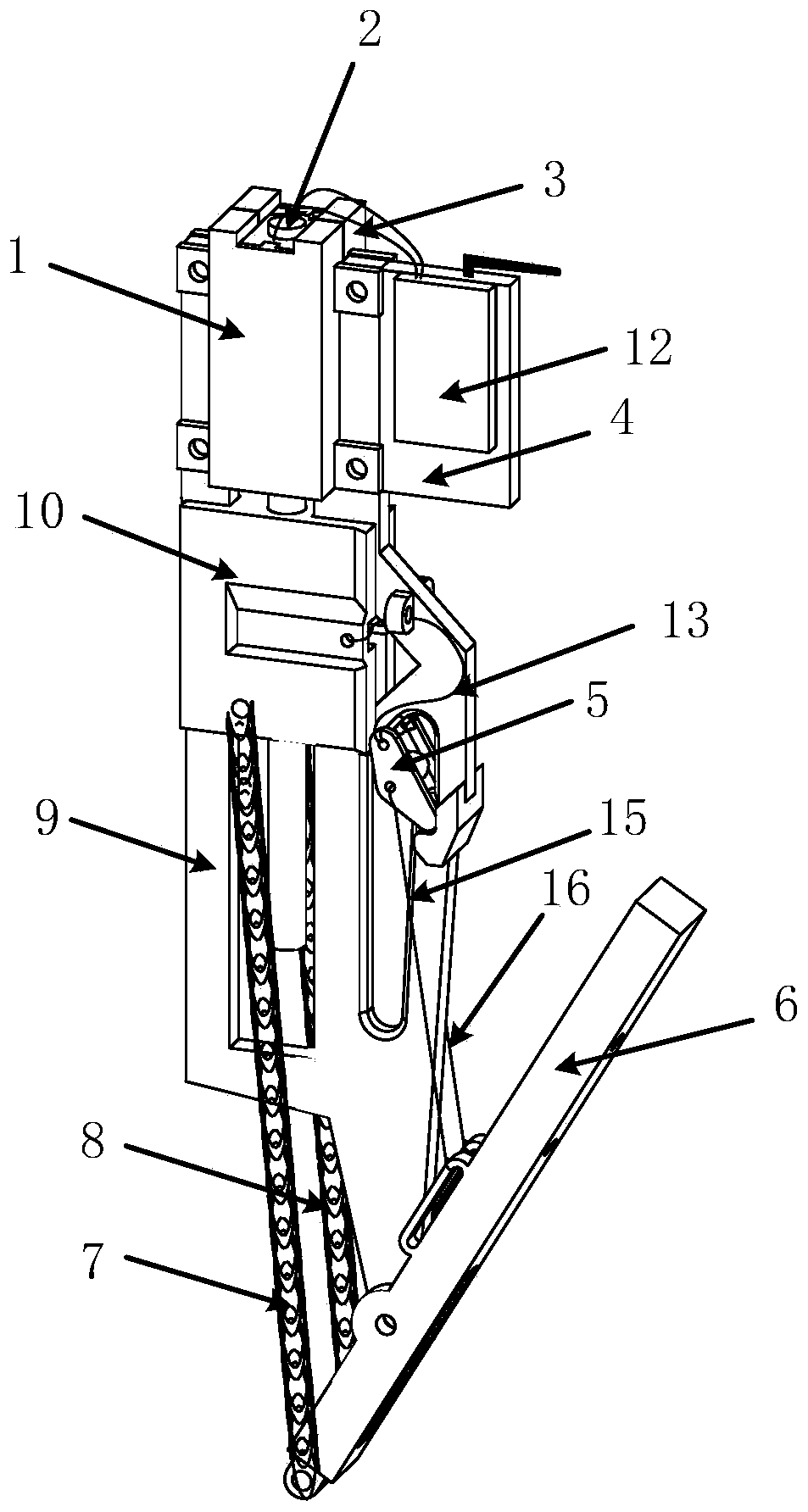
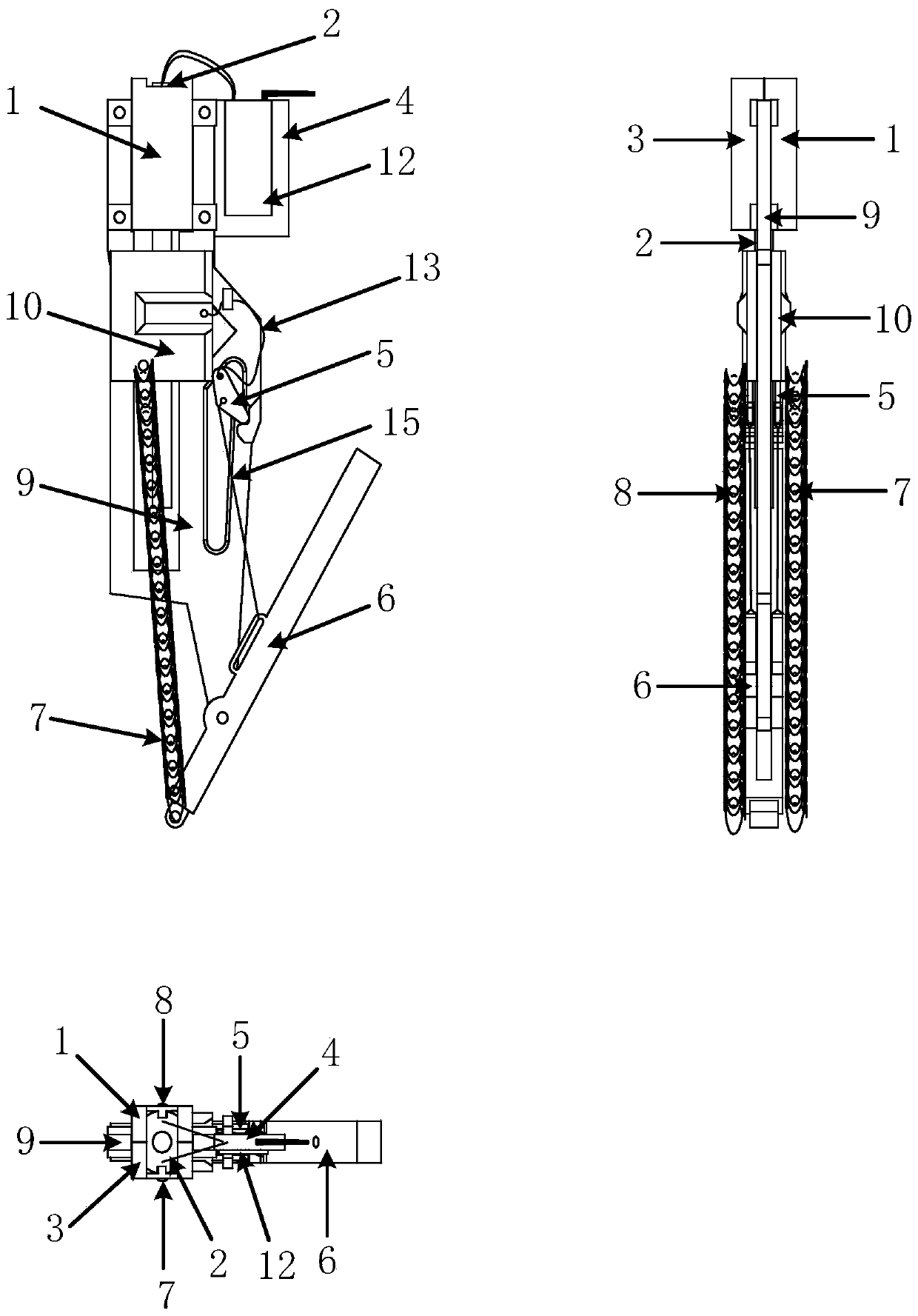
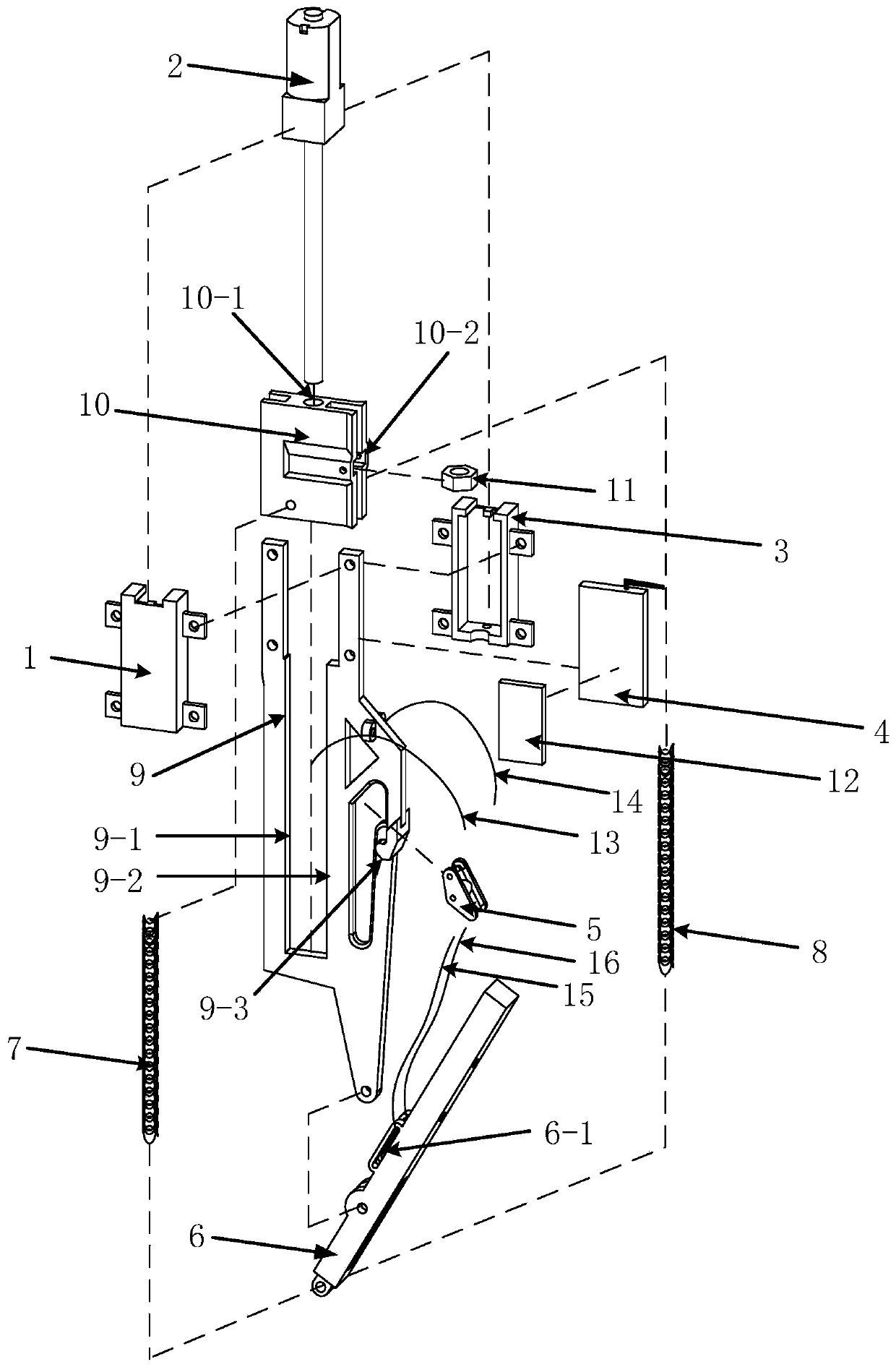
[0031] combine Figure 1-7, the present embodiment is a motion bionic mechanism for simulating a jumping beetle jumper and a jumping method thereof, including a motor front fixing part 1, a DC motor 2, a motor rear fixing part 3, a wireless control circuit board 4, a lanyard slider 5, Base plate 6, strip type chute 6-1, front spring 7, rear spring 8, main fixed plate 9, left cantilever 9-1, right cantilever 9-2, hook boss 9-3, moving slider 10, Middle cylinder through hole 10-1, square hole 10-2, nut 11, battery 12, pull up left thin wire 13, pull up right thin wire 14, pull down left thin wire 15 and pull down right thin wire 16 form.
[0032] like Figure 1-3 As shown, the motion bionic mechanism of a kind of simulated jumper is characterized in that: the side of the mobile slider 10 has a square hole 10-2, and the nut 11 is inserted into th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com