

Monocular depth estimation system implementation method based on adversarial network
A system implementation and depth estimation technology, applied in computing, image data processing, instruments, etc., can solve the problems of difficult 3D structure and inability to know, achieve high depth recovery accuracy, break the bottleneck of depth voids and depth sparse, and small training Effects of dataset requirements and time overhead
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The following embodiments will further illustrate the present invention in conjunction with the accompanying drawings.
[0038] Embodiments of the present invention include a training phase and a test, and the specific steps of the training phase are:
[0039] 1) collect the RGB image set I={I for training 1 , I 2 ,...,I n , I n+1 ,...,I n+m} and the depth image set D={D corresponding to the first n images 1 ,D 2 ,...,D n};
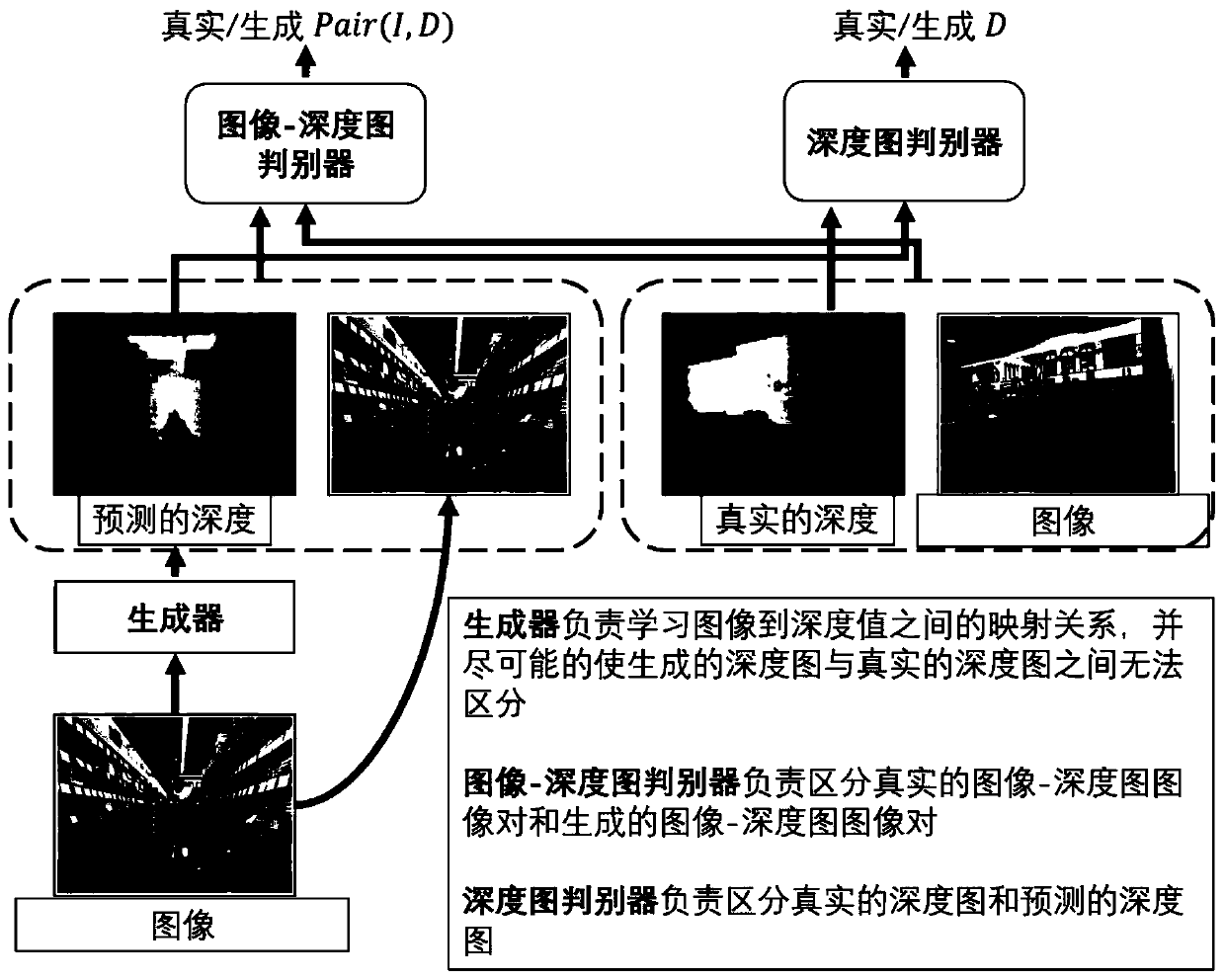
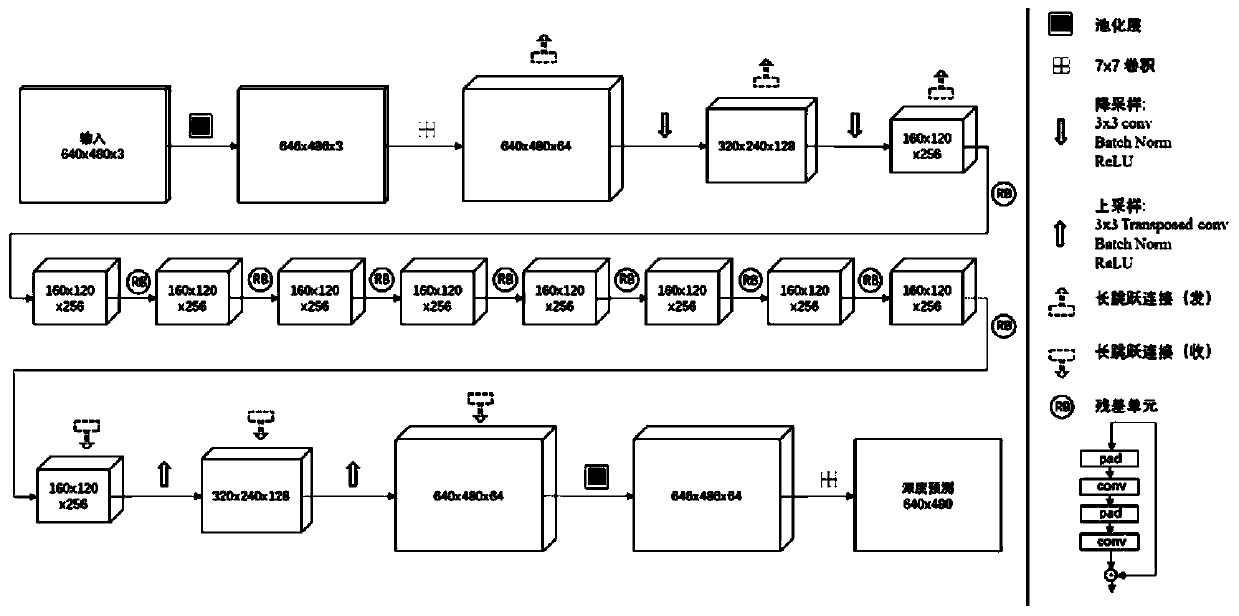
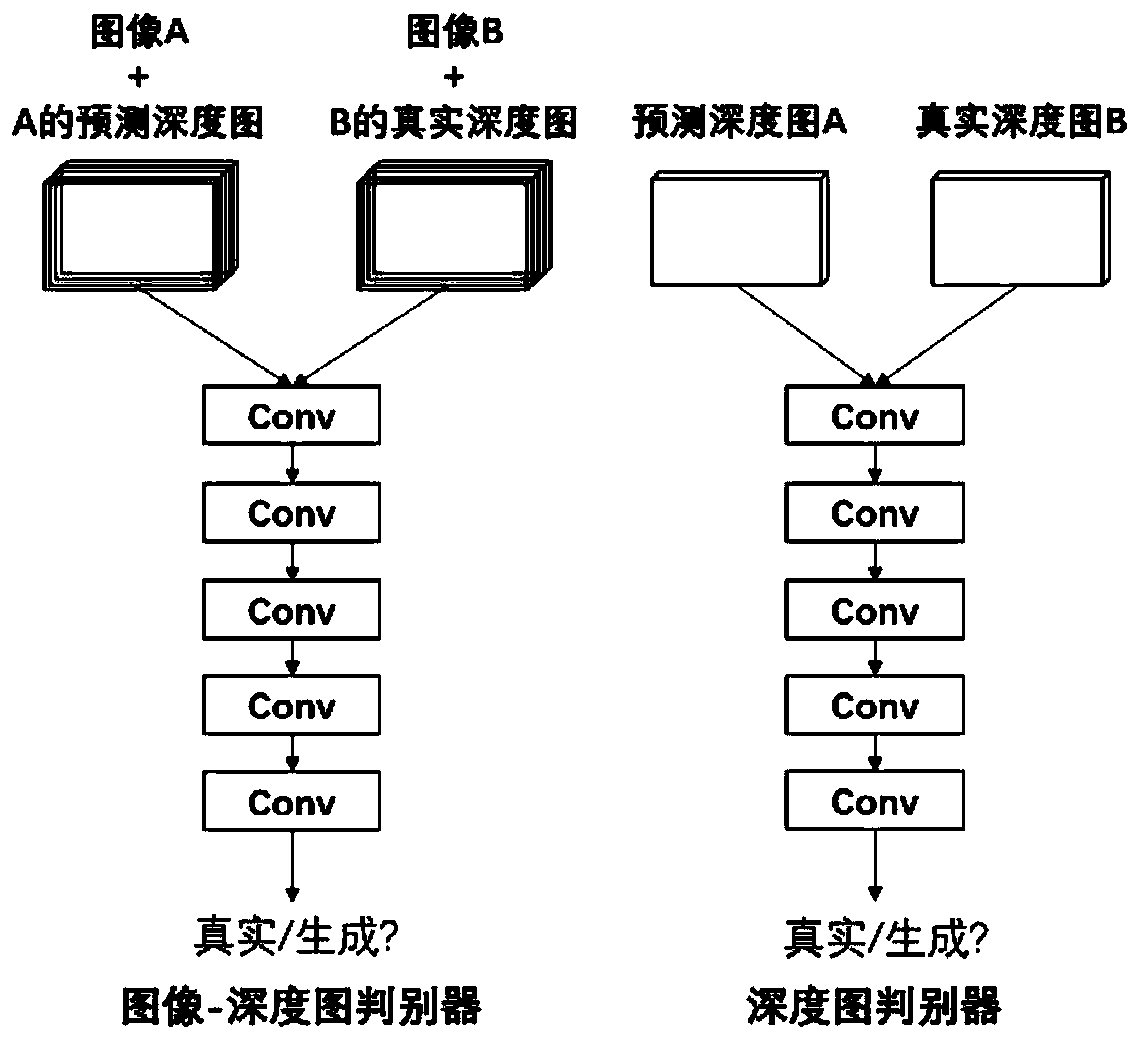
[0040]2) Initialize the generator network parameters θ according to the designed network structure G and the parameters θ of the two discriminator networks PD ,θ DD ;
[0041] 3) Set the number of iterations of training, in each iteration:
[0042] 3.1 From {I 1 ,I 2 ,...,I n} and {D 1 ,D 2 ,...,D n} sample k image-depth map image pairs {(i,d) (1) ,...,(i,d) (k)} form a subset sum for training;
[0043] 3.2 From {I n+1 ,...,I n+m} sample k images {i' (1) ,...,i' (k)} form a subset sum for training;
[0044] 3.3 Update imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More