

Wheel point cloud detection method for intelligent garage
A smart garage and detection method technology, applied in the field of computer vision and artificial intelligence, can solve the problems of unrecognizable wheel attitude, poor robustness, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
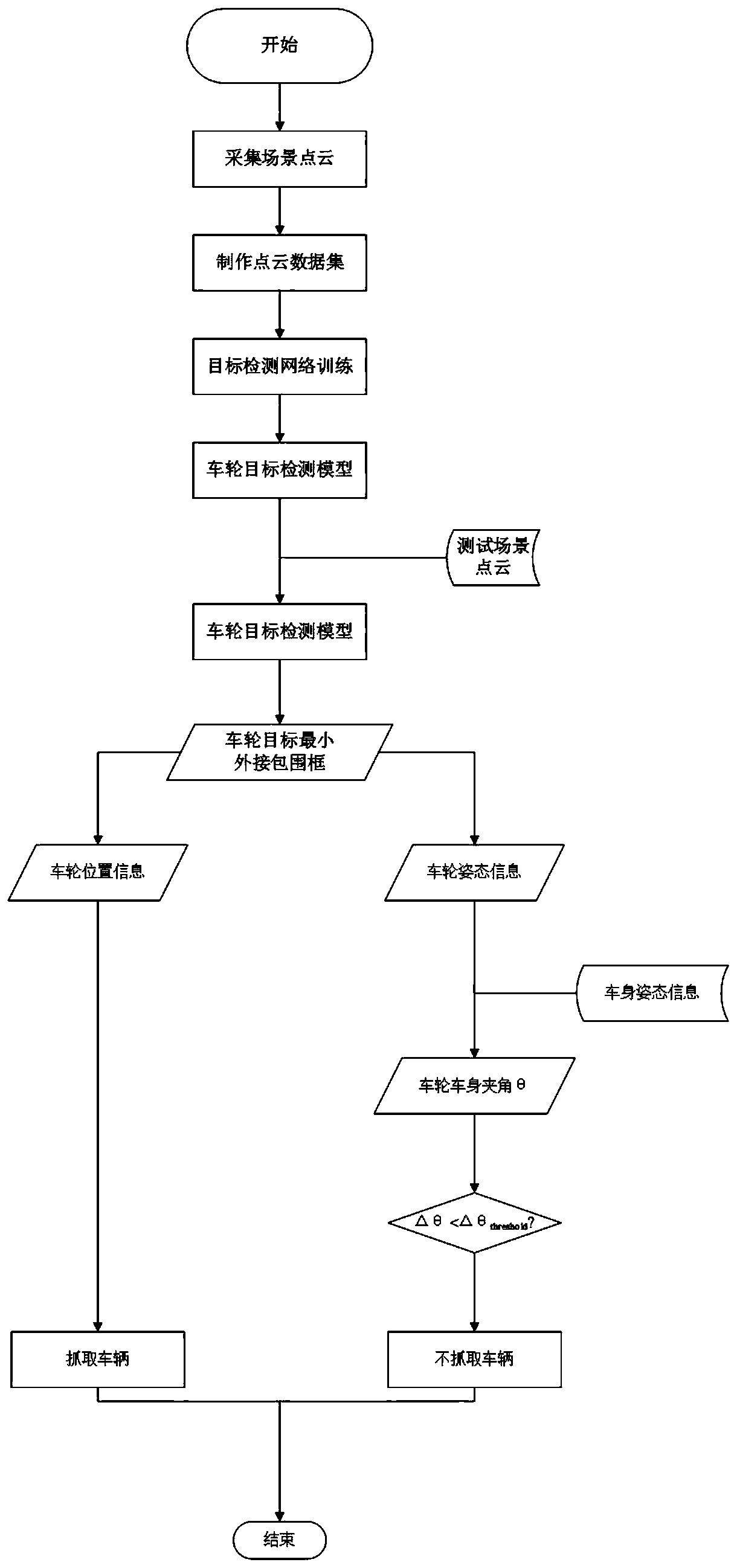
[0052] In order to better understand the technical solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings. The main steps of the flow process in the embodiment are as figure 1 , the specific implementation process is as follows:
[0053] Step 1. Use 2D single-line lidar to collect 3D point cloud of the parking area scene, and make a point cloud dataset in the smart garage scene. Before making a data set, it is first necessary to convert the original distance information obtained by scanning into the form of point cloud data represented by three-dimensional coordinates. Methods as below:
[0054] Step 1.1, the car picking manipulator is fixedly connected to the vertical mechanical frame, and the car picking cover for clamping the vehicle is fixed on the manipulator. The car cover includes a car cover shell, the bottom of the shell is respectively provided with a clamping mechanism for c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More