

Distributed autonomous underwater vehicle attitude collaborative optimization control method
A technology of an underwater vehicle and a control method, applied in the field of navigation, can solve problems such as uncontrollable input optimization design, and achieve the effect of stable performance indicators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
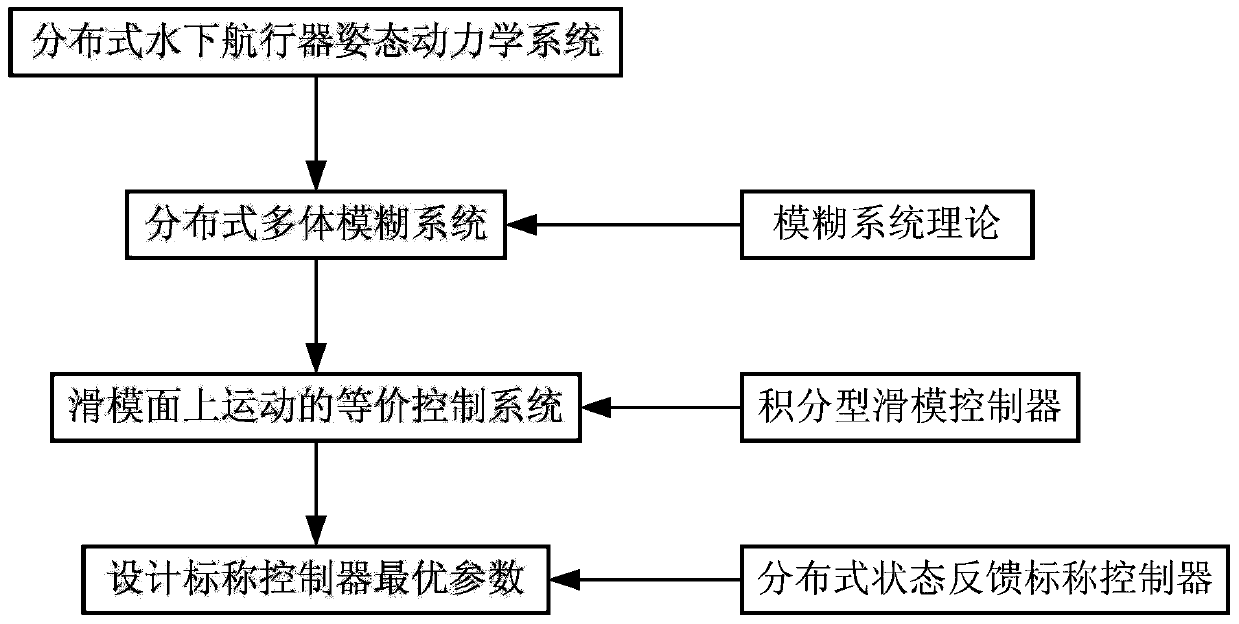
[0068] Step 1: Considering that the autonomous underwater vehicle is a rigid body, the distributed autonomous underwater vehicle attitude system is regarded as a multi-rigid body attitude system, and the distributed autonomous underwater vehicle attitude system is constructed as a fuzzy system by using fuzzy theory. Firstly, the attitude model of the distributed autonomous underwater vehicle is given as follows:
[0069]
[0070] In the formula, J represents the inertia matrix of the underwater vehicle; η i and η i0 denote the unit quaternion vector and scalar part used to describe the attitude of the underwater vehicle, respectively; ω i Indicates the attitude angular velocity; u i and f i Respectively represent the control input and external disturbance input acting on the underwater vehicle. Transform equation (1) into a state space equation as shown b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More