

Wireless optical communication neighbor discovery system and method for underwater multi-robot formation
A wireless optical communication and neighbor discovery technology, applied in wireless communication, transmission system, optical fiber radio, etc., can solve the problems of long towed antenna, inability to communicate in real time, high energy consumption, etc., achieve strong anti-interference performance, long transmission range, The effect of high data rates
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0034] First, define the parameters in the present invention:
[0035] 30 underwater robots, 5 token setting parameters, pre-specified time A = 1 minute, number of transmissions L = 3, backoff time V = 100ms, data transmission rate 100kbps, effective communication distance 30 meters, latitude / longitude scanning The period is 10ms, request information frame, response information frame and confirmation information frame structure. Set timer T1 and T2 in addition, be used for waiting time timing, waiting time T1=T2=500ms;
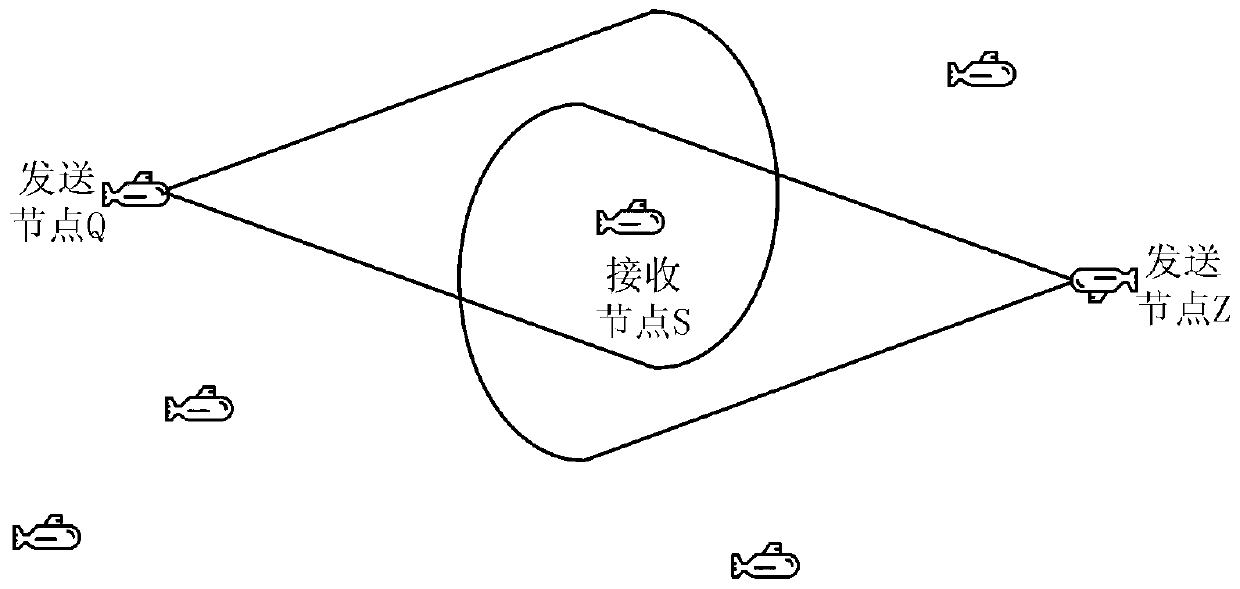
[0036] In this embodiment, nodes A, B, and C of the underwater robot are selected as examples to describe the neighbor discovery process, where Q is the node that initiates neighbor discovery, S is the node that receives information, and Z node is the node that initiates neighbor discovery, such as figure 2 shown;
[0037] Step 1: Randomly select 5 nodes among all nodes to hold tokens in advance, and then keep the number of tokens unchanged; in order to ensure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More