

Full ocean depth ARV underwater robot structure
A technology of underwater robots and robots, applied in underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problems of lack of fixed-point sampling operations, inability to move in a large range, and inability to return data from time to time, so as to achieve easier control operations , light weight, small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
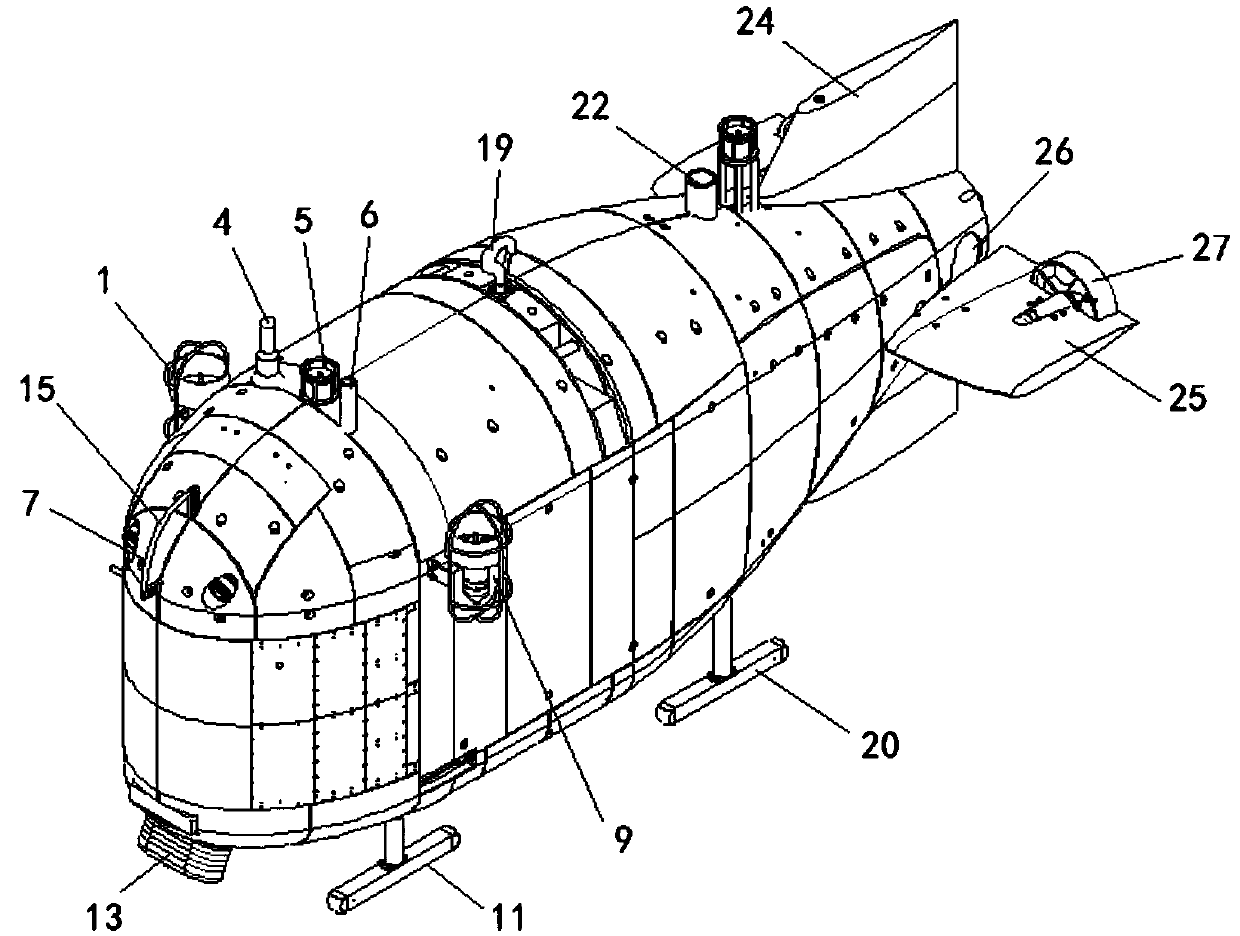
[0028] All-deep autonomous remote-controlled underwater vehicle (ARV, Autonomous&Remotely operatedVehicle for short) is an unmanned underwater robot that combines the advantages of autonomous underwater vehicles (AUV) and remote-controlled underwater vehicles (ROV). ARV combines the advantages of both. Under the premise of ensuring that the robot can move in a large range, it has the ability to perform fixed-point operation sampling. Moreover, due to the existence of tiny optical fibers, it can return the internal data of the robot in real time.
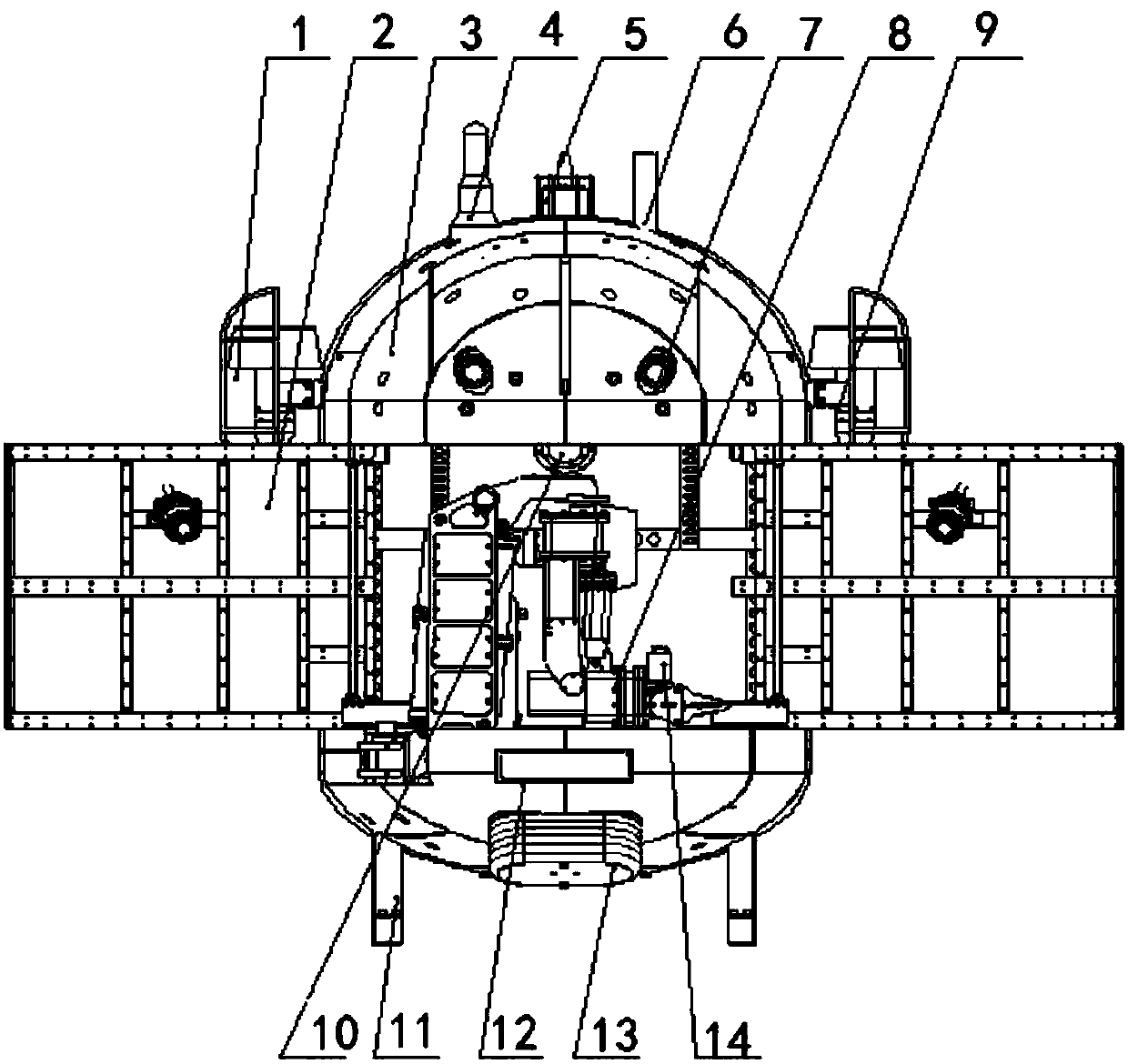
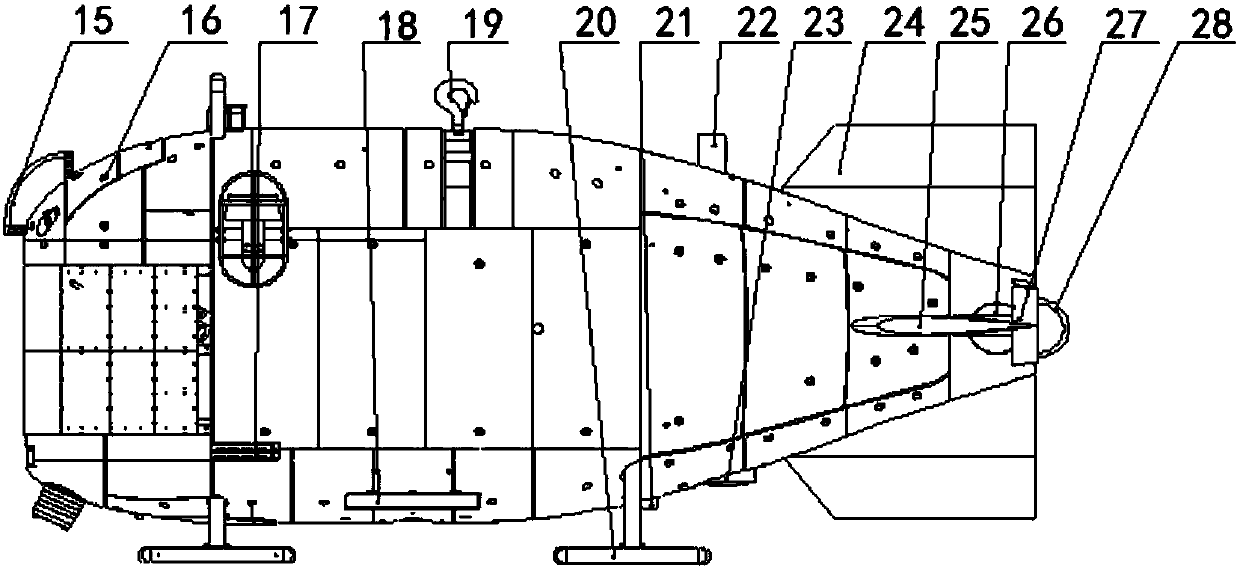
[0029] Such as Figure 1-3 As shown, the structure of a full-sea deep ARV underwater robot provided by the present invention includes a cabin, a starboard vertical thruster 1, a port vertical thruster 9,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More