

AGV positioning system and method for fusing 2D environmental map and sparse artificial landmark
A technology of artificial landmarks and environmental maps, applied in control/adjustment systems, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problem of decreased positioning accuracy of artificial landmarks, increased navigation costs, and insufficient positioning accuracy Satisfaction and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
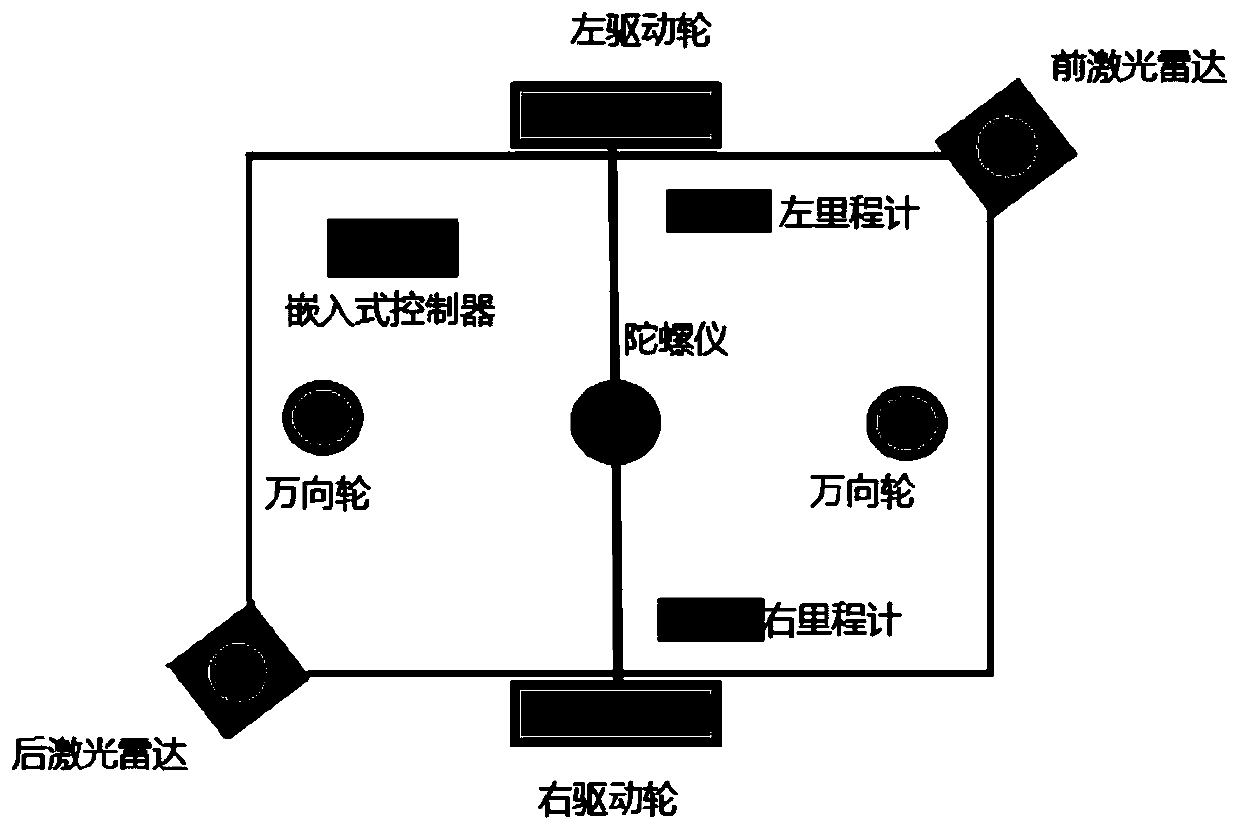
[0078] The present invention provides an AGV high-precision positioning system that integrates 2D environmental maps and sparse artificial landmarks. The system includes vehicle-mounted equipment and artificial landmarks arranged in the work scene; the vehicle-mounted equipment includes two laser radars, gyroscopes, and mileage Meter and positioning unit, taking the differential wheel driven AGV as an example, such as figure 1 As shown, the lidar must be installed on two opposite corners of the car body to ensure that the lidar scanning points can cover the surrounding of the car body. The gyroscope needs to be installed at the midpoint of the connection between the two driving wheels of the AGV.
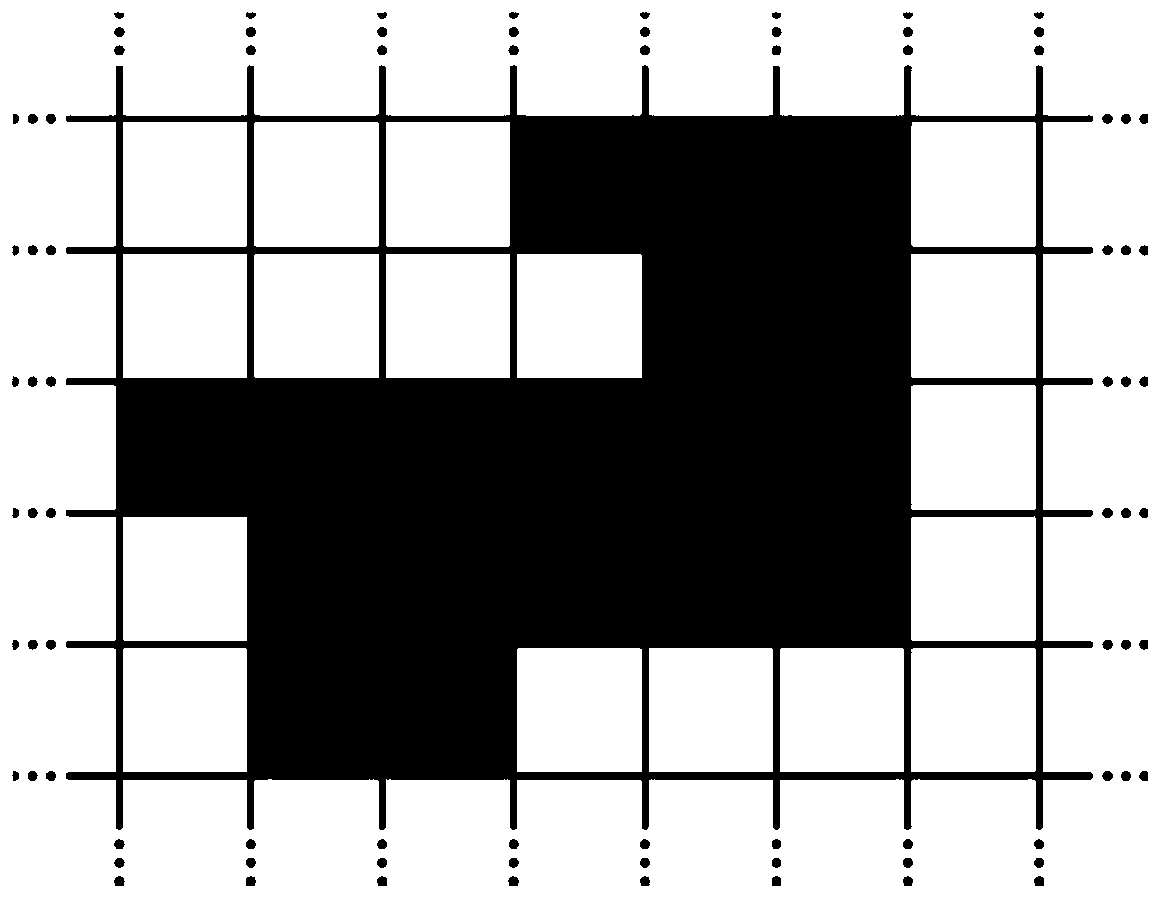
[0079] Such as figure 2 Shown is a sche...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More