

Path planning method based on DBQ algorithm
A path planning and algorithm technology, applied in two-dimensional position/course control, vehicle position/route/height control, non-electric variable control, etc., can solve the problems of poor applicability of algorithms, low learning efficiency, and low probability of rewards, etc. problem, to achieve the effect of improving accuracy and speeding up convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
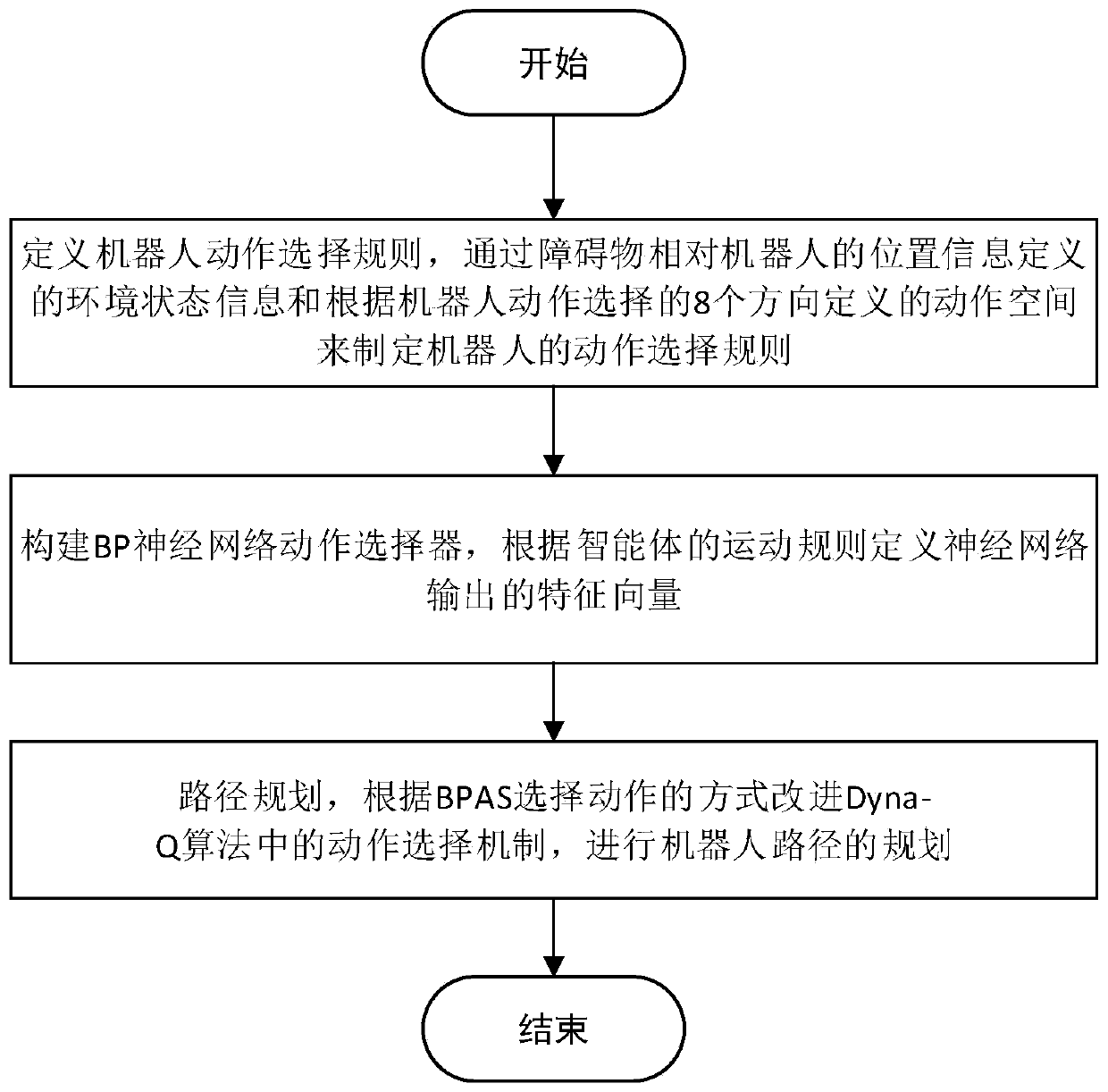
[0059] Based on the above problem description, in order to realize the purpose of the present invention, the present invention adopts the following steps:
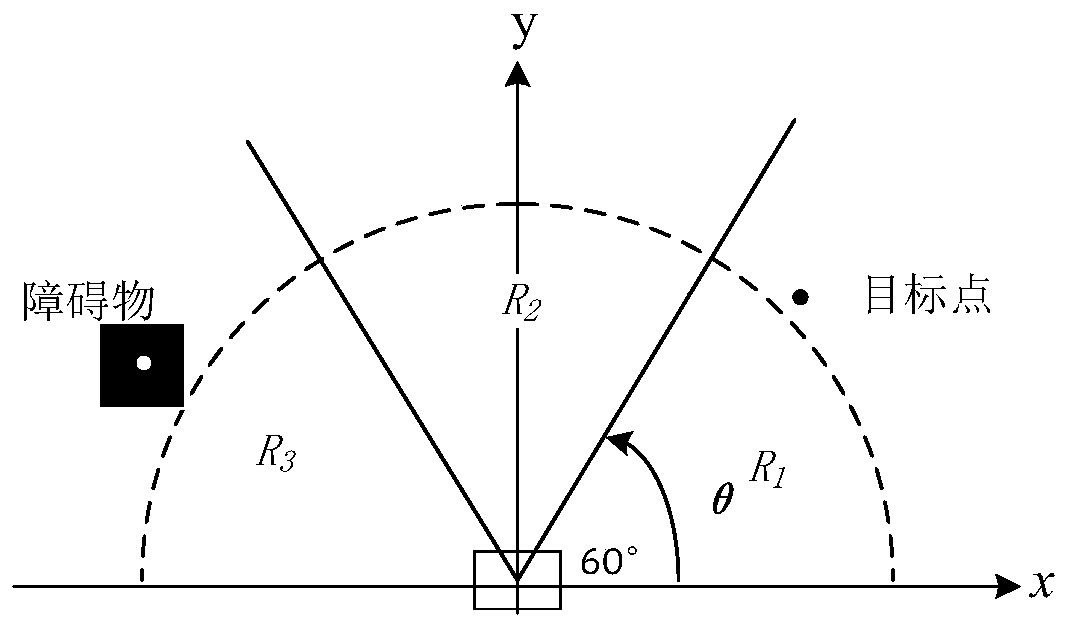
[0060] Step 001. Robot action selection rules, the action selection rules of the robot are mainly formulated through the environmental state information defined by the position information of the obstacle relative to the robot and the action space defined according to the 8 directions selected by the robot action.
[0061] Step 002. The BP neural network action selector defines the feature vector output by the neural network according to the movement rules of the agent.
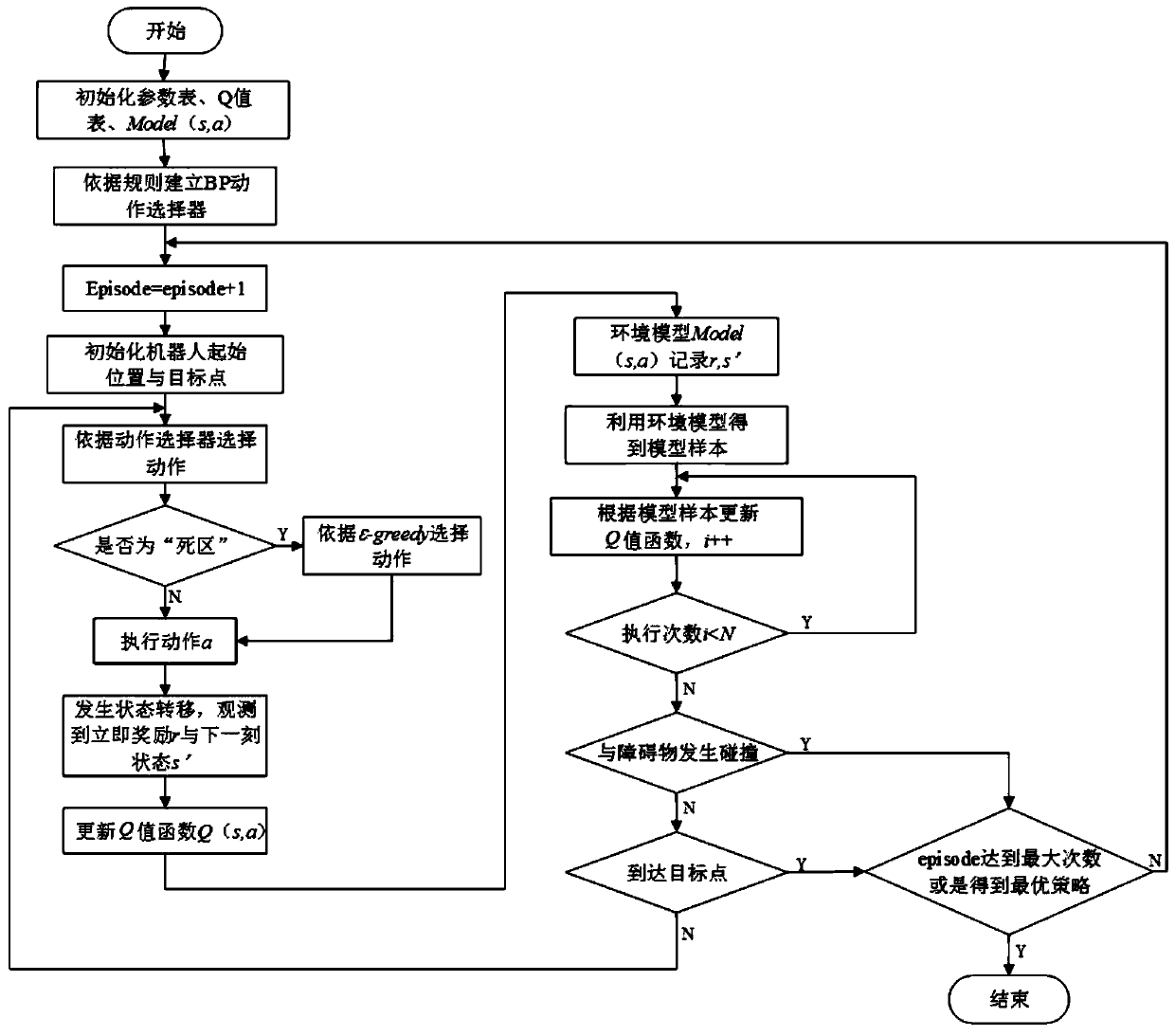
[0062] Step 003. Path planning, using the rule-based action selection model constructed in step 002 to replace the action selection mechanism in the Dyna-Q algorithm to plan the robot path.
[0063] The step 001 specifically includes the following steps:
[0064] Step 00101. Definition of environment state information. Define the position information of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More