

Three-dimensional target detection method
A target detection algorithm and detection method technology, applied in the field of 3D target detection, can solve problems such as backward detection accuracy, and achieve the effects of improving speed and accuracy, fine-grained instance segmentation, and high recall rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
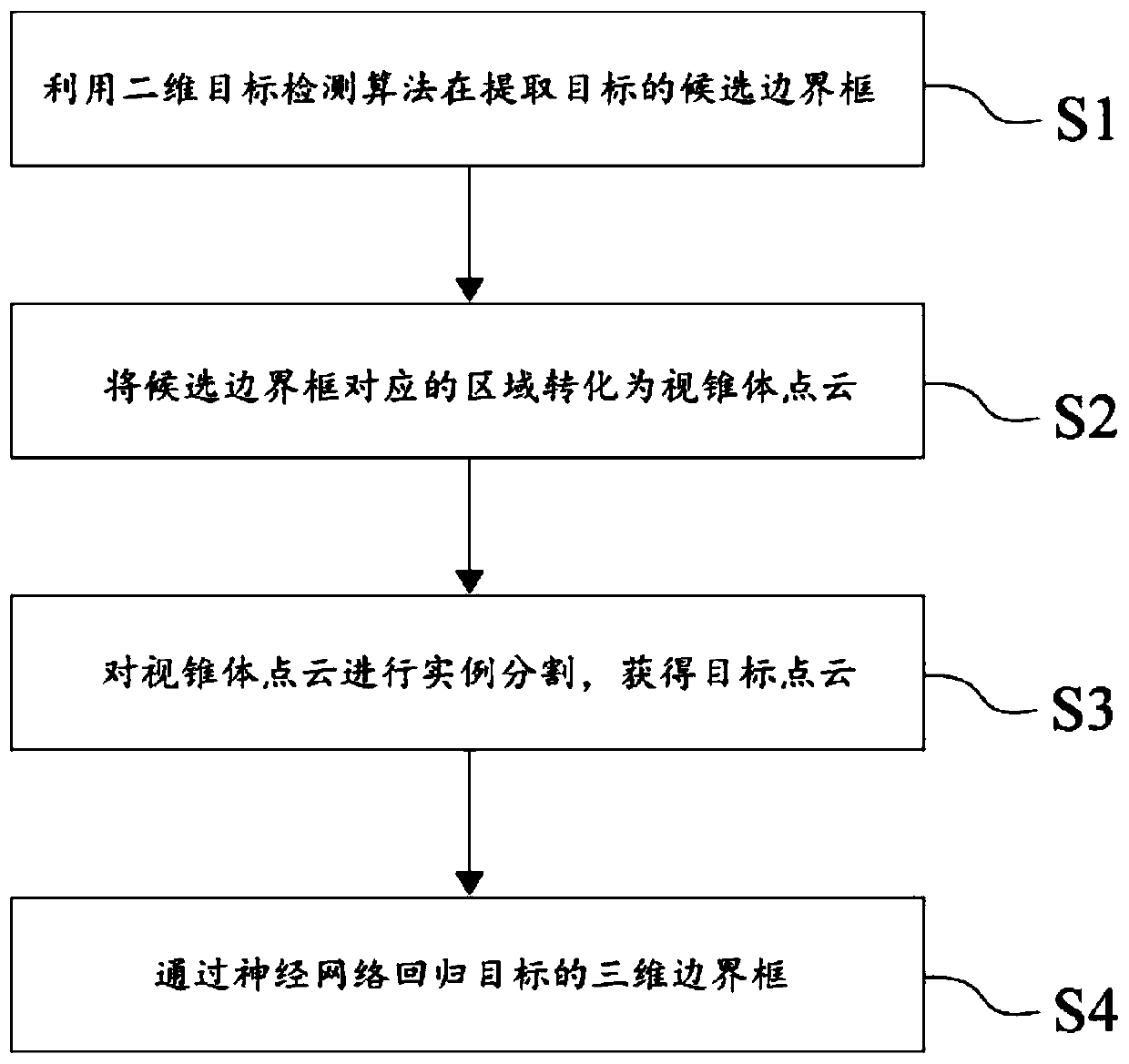
[0029] see figure 1 , the invention discloses a three-dimensional object detection method, which comprises the following steps:
[0030] S1. Using a two-dimensional object detection algorithm to extract a candidate bounding box of an object on the original image.
[0031] The original image is a depth image, and the candidate bounding boxes are 2D bounding boxes. The purpose of extracting candidate bounding boxes is to extract point clouds within their bounding boxes. The two-dimensional target detection algorithm adopts the existing detection algorithm, as long as the purpose of obtaining the two-dimensional bounding box of the target can be achieved, and the present invention does not specifically limit it.
[0032] S2. Convert the depth image region corresponding to the candidate bounding box into a frustum point cloud. This step is achieved through the following sub-steps:
[0033] S21. Extract the depth image region corresponding to the candidate bounding box to obtai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More