

Gas particle hybrid driving variable stiffness software robot and operation method thereof
A hybrid drive, variable stiffness technology, applied in the field of robotics, can solve the problems of reduced fluidity of particulate matter, limited application range, and reduced flexibility of elastic deformation cavity wall deformation, and achieves high flexibility. The effect of carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
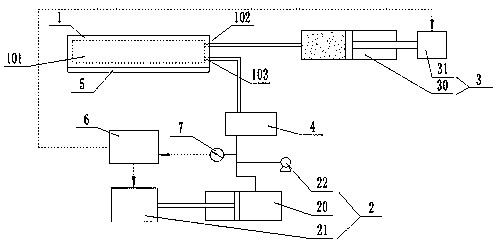
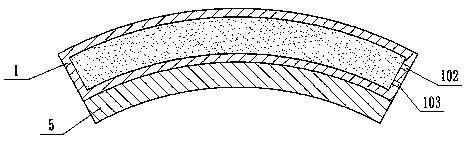
[0030] like figure 1 and 2 As shown, a kind of gas particle mixed driving variable stiffness soft robot provided in this embodiment includes:
[0031] An elastically deformable body 1 with an inner cavity 101;
[0032] Vacuum inflator 1, the vacuum inflator 1 is connected with the elastic deformation body 1 and is used to fill the inner cavity 101 with gas, and at the same time is used to extract the gas in the inner cavity 101, so that the The inner chamber 101 forms a vacuum or negative pressure;
[0033] A particle conveying device 3 , the particle conveying device 3 is connected with the elastic deformation body 1 and used for conveying particles to the inner cavity 101 .
[0034] In this embodiment, the elastic deformable body 1 is provided with a gas channel 103 and a particle conveying channel 102 that communicate with the inner cavity 101 , and the vacuum inflator 1 communicates with the gas channel 103 through a reversing valve 4 ; The particle conveying device 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More