

Robot hand claw device capable of automatically hanging and taking piece for spraying production line
A robot hand and production line technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of easy grasping failure and high flatness requirements, and achieve a low probability of grasping failure, fast calculation speed, and high work efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
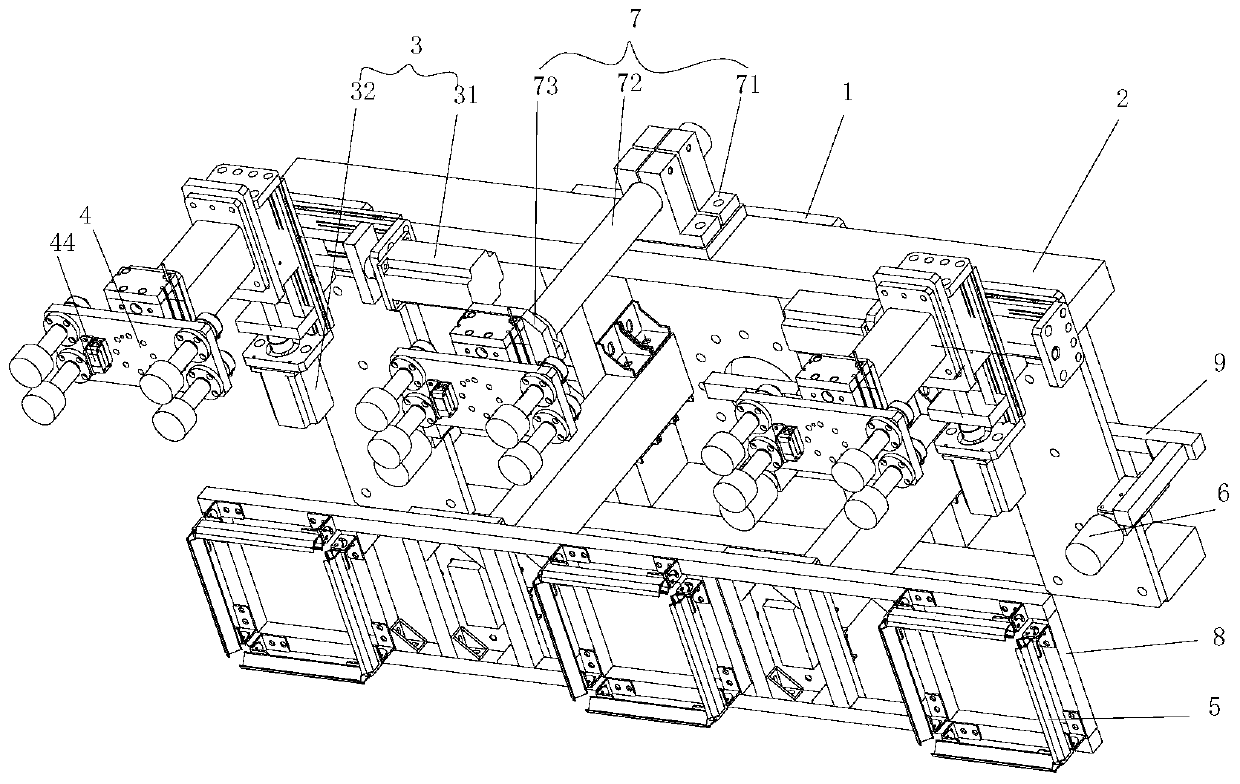
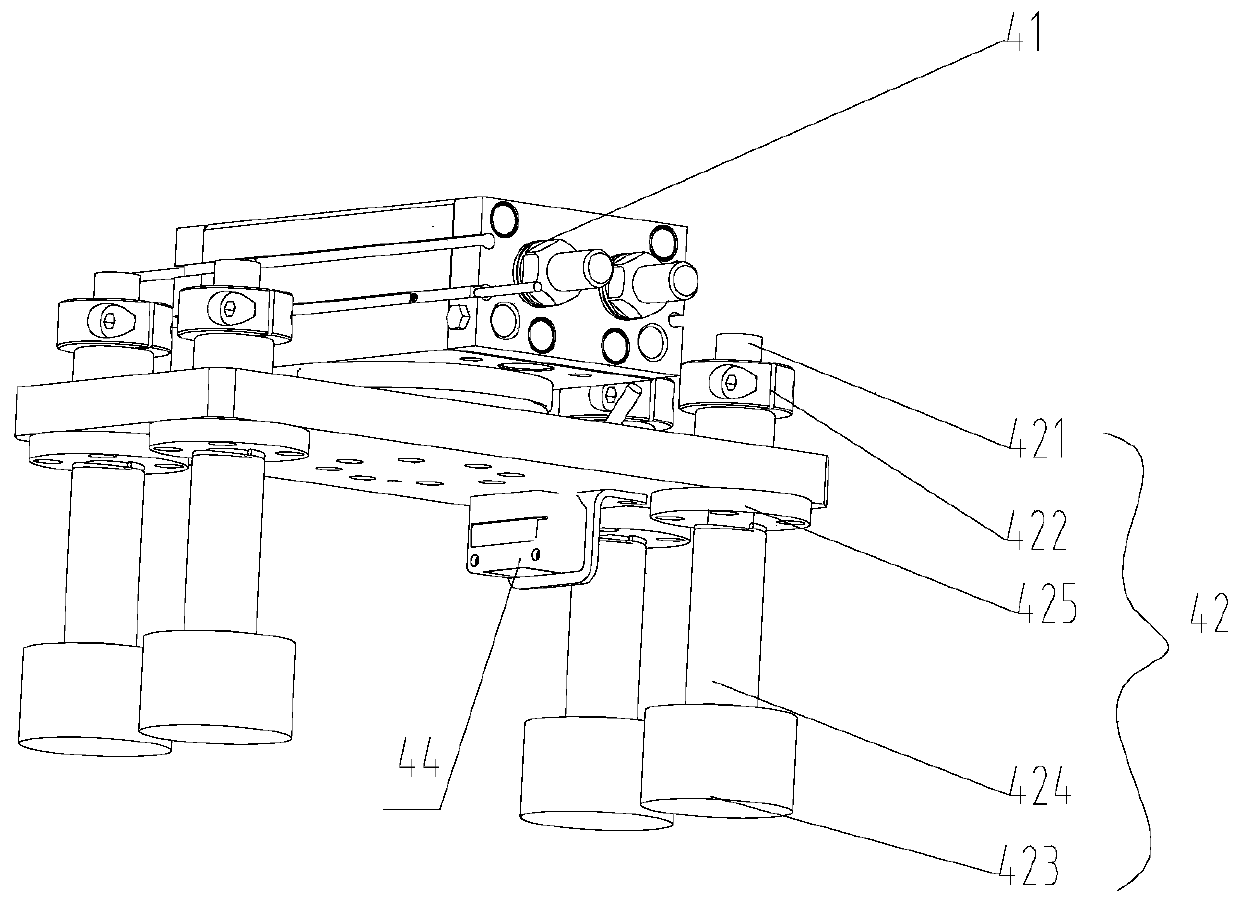
[0024] Such as Figure 1-Figure 2 The shown specific embodiment of a robot gripper device for automatically hanging and picking parts of a spraying production line of the present invention includes an installation chassis 2 fixedly connected to the end of the industrial robot through the installation flange 1, and a plurality of installation chassis 2 installed on the installation chassis 2. A cross slide drive assembly 3, an electromagnet chuck mechanism 4 installed at the output end of the cross slide drive assembly 3, and a light source 5 and a camera 6 installed on the installation chassis 2 corresponding to each electromagnet chuck mechanism 4; see figu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More