

Logistics transportation system, unmanned aerial vehicle, landing platform and control method thereof
A technology of transportation system and control method, which is applied in the field of landing platform and its control, unmanned aerial vehicle, and logistics transportation system. It can solve the problems of short cruising range, complex structure of unmanned aerial vehicles, high manufacturing and energy consumption costs, and reduce its own weight. and manufacturing costs, improving the degree of automation and logistics transportation efficiency, and the effect of simple connection structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
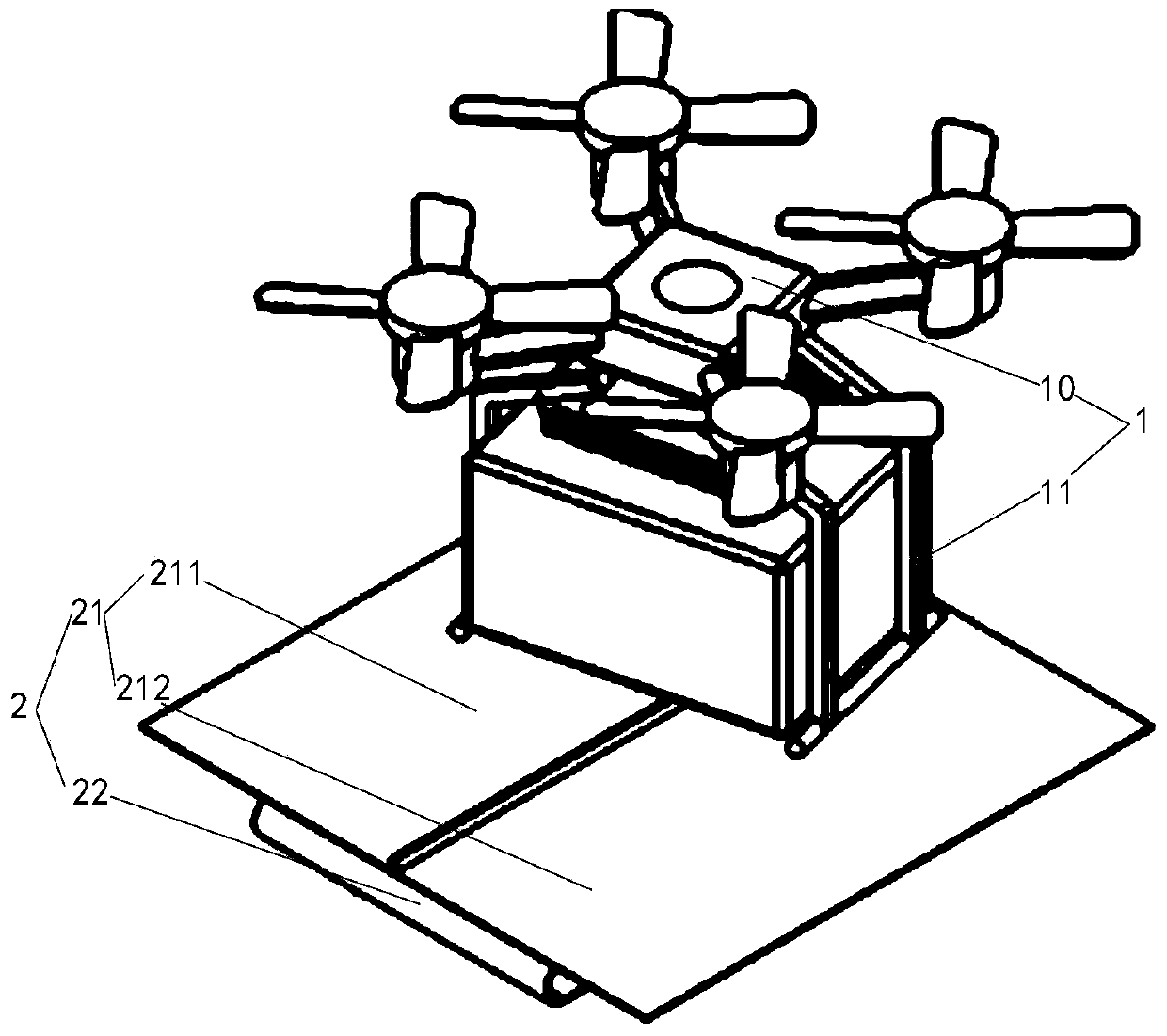
[0054] refer to Figure 1 to Figure 4, the embodiment of the present invention provides a logistics transportation system, the logistics transportation system includes a drone 1 and a landing platform 2;
[0055] The drone 1 includes a drone body 10 and a landing gear assembly 11;
[0056] The landing gear assembly 11 includes a first bracket 111, a second bracket 112 and an elastic reset member 113;
[0057] The first bracket 111 is arranged opposite to the second bracket 112, at least one bracket in the first bracket 111 and the second bracket 112 is movably connected with the drone body 10, and the first bracket 111 A loading space for clamping the cargo box 12 is formed between the second bracket 112;
[0058] The elastic reset member 113 is arranged between the first bracket 111 and the second bracket 112, or, the elastic reset member 113 is arranged between any bracket and the drone body 10;
[0059] The landing platform 2 includes a platform base and a push-pull asse...
Embodiment 2
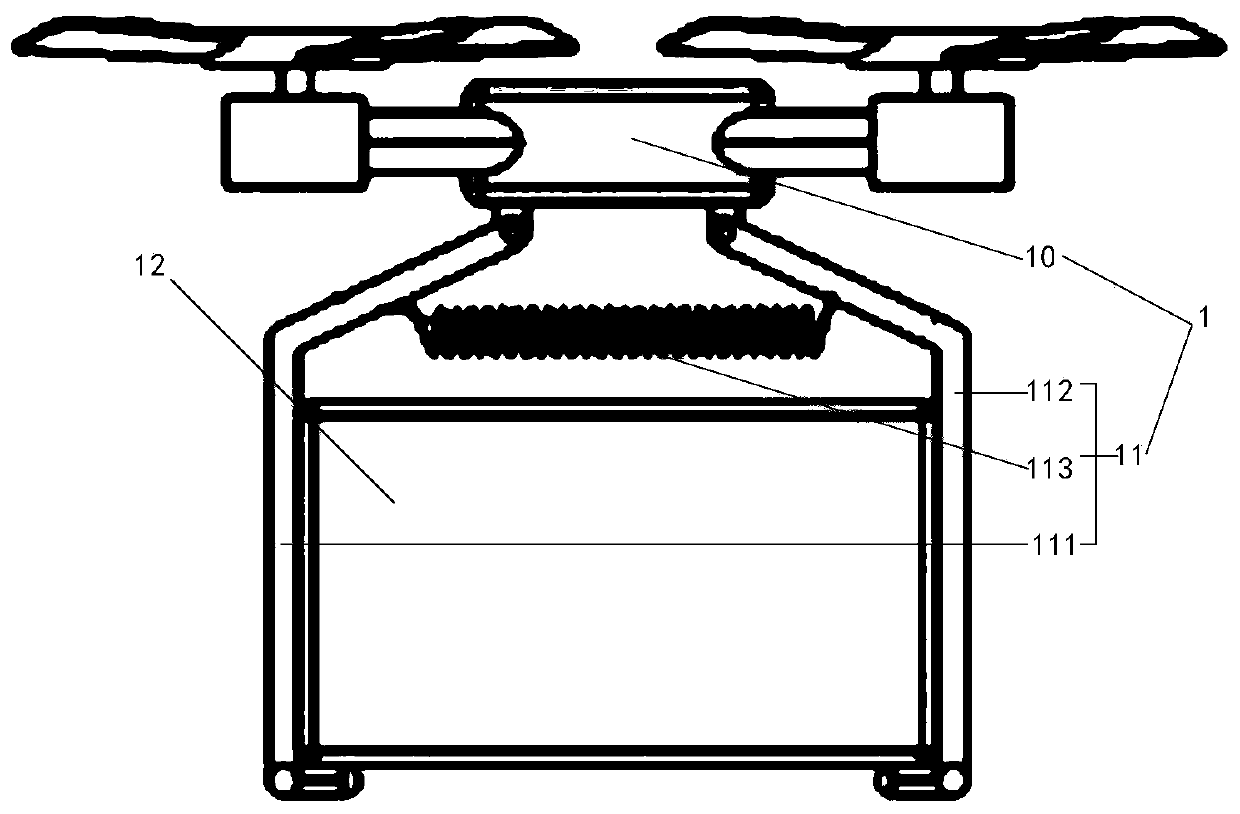
[0072] refer to figure 2 , the embodiment of the present invention provides a UAV 1, the UAV 1 includes a UAV body 10 and a landing gear assembly 11;
[0073] The landing gear assembly 11 includes a first bracket 111, a second bracket 112 and an elastic reset member 113;
[0074] The first bracket 111 is arranged opposite to the second bracket 112, at least one bracket in the first bracket 111 and the second bracket 112 is movably connected with the drone body 10, and the first bracket 111 A loading space for clamping the cargo box 12 is formed between the second bracket 112;
[0075] The elastic reset member 113 is arranged between the first bracket 111 and the second bracket 112 , or, the elastic reset member 113 is arranged between any bracket and the drone body 10 .
[0076] Specifically, as figure 2 As shown, a drone 1 provided in the embodiment of the present invention includes a drone body 10 and a landing gear assembly 11 . The UAV body 10 is the body where the p...
Embodiment 3
[0095] refer to figure 1 , the embodiment of the present invention provides a landing platform 2 for undertaking the landing of the UAV 1 in the second embodiment, the landing platform 2 includes a platform base and a push-pull assembly 21;
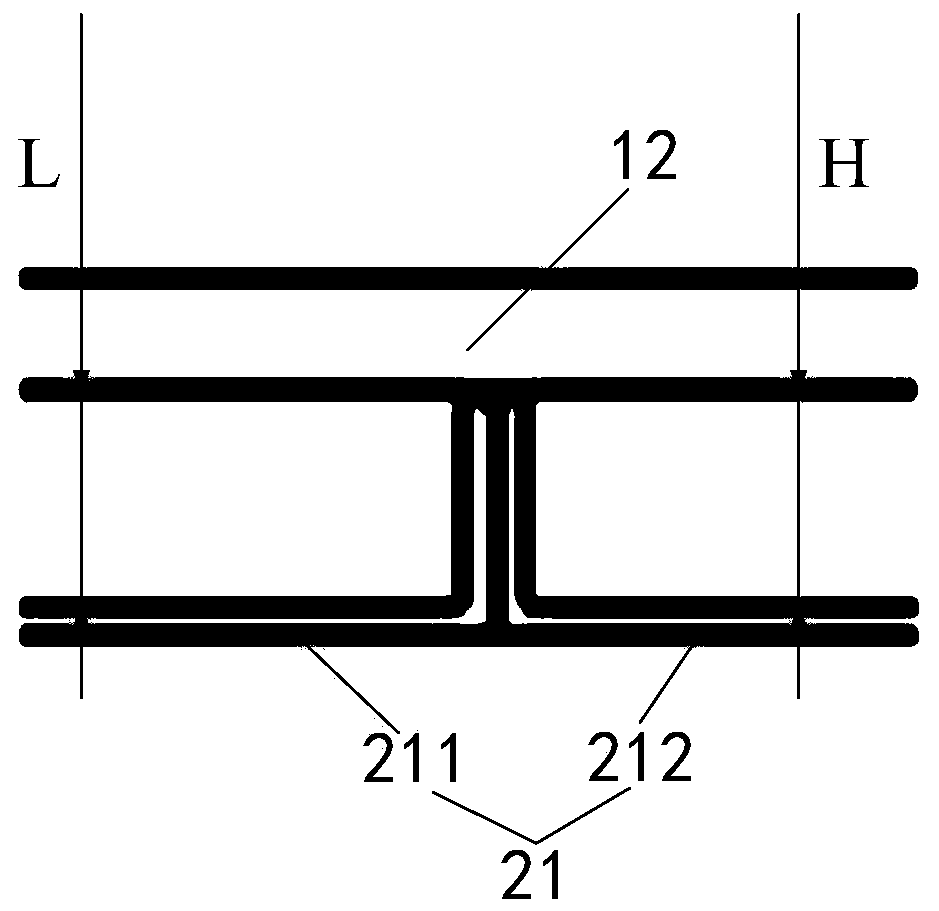
[0096] The push-pull assembly 21 includes a first push plate 211 and a second push plate 212, at least one of the first push plate 211 and the second push plate 212 is provided with a push-pull hook on the first surface, wherein, The first surface is a landing surface on which the UAV lands and stops;
[0097] The first push plate 211 is opposite to the second push plate 212 on the same horizontal plane, and at least one of the first push plate 211 and the second push plate 212 is slidably connected to the platform base ;
[0098] The push-pull hook drives the movement of the first support 111 and / or the second support 112 , wherein the distance between the container 12 and the first surface is at least equal to the height of the push-p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More