Multi-degree-of-freedom light single-leg mechanism
A degree of freedom, lightweight technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problem that the volume structure and torque of the motor cannot reach the volume and weight of the output torque of the robot, the easily damaged robot circuit connection and parts, and the reduction of the single-leg mechanism Problems such as motion work space, to achieve the effect of improving bearing capacity and control accuracy, improving motion flexibility, and widening the range of motion work space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention is further described below in conjunction with accompanying drawing:
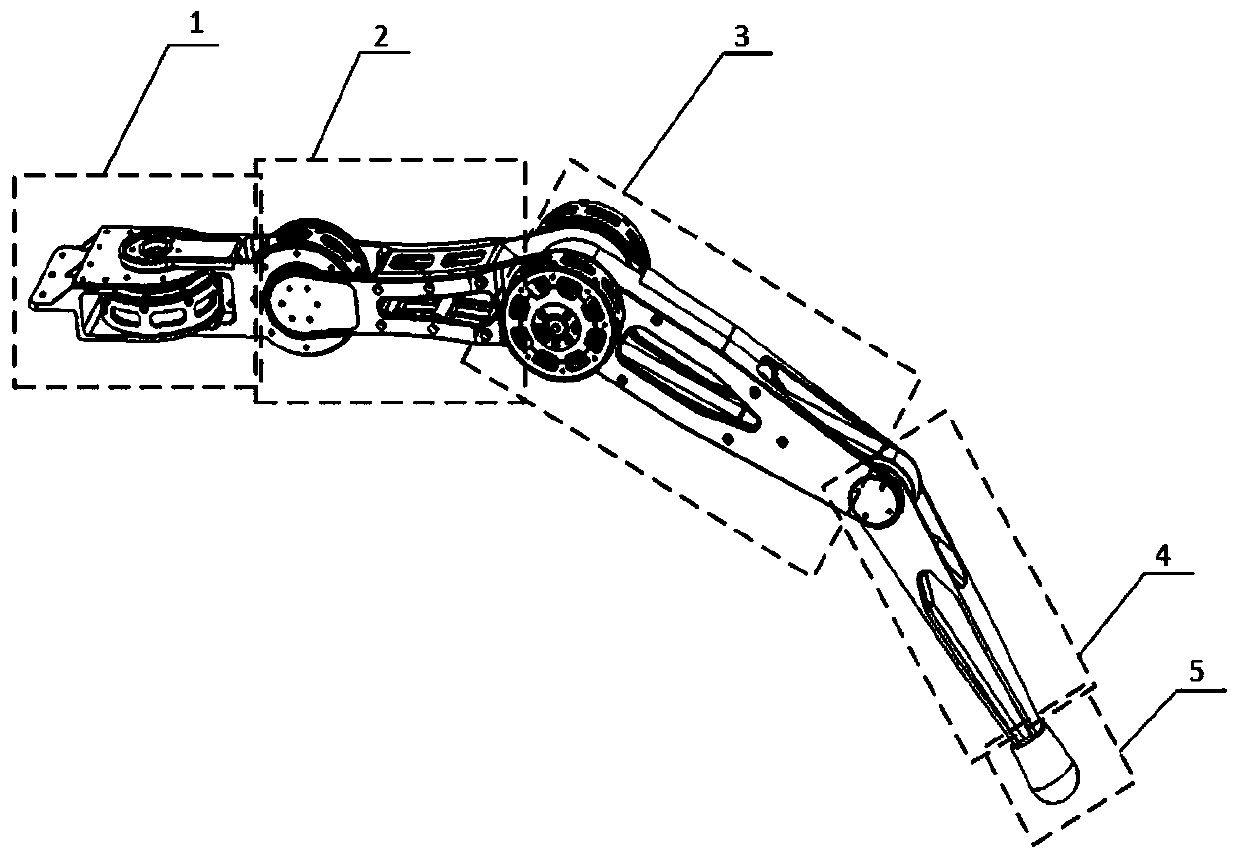
[0057] see Figure 1 to Figure 11 , a multi-degree-of-freedom light single-leg mechanism, including a hip joint module 1, a knee joint module 2, an ankle joint module 3, a tibia 4 and a foot end 5; a hip joint module 1, a knee joint module 2, an ankle joint module 3, The tibia 4 and the foot end 5 are sequentially connected;
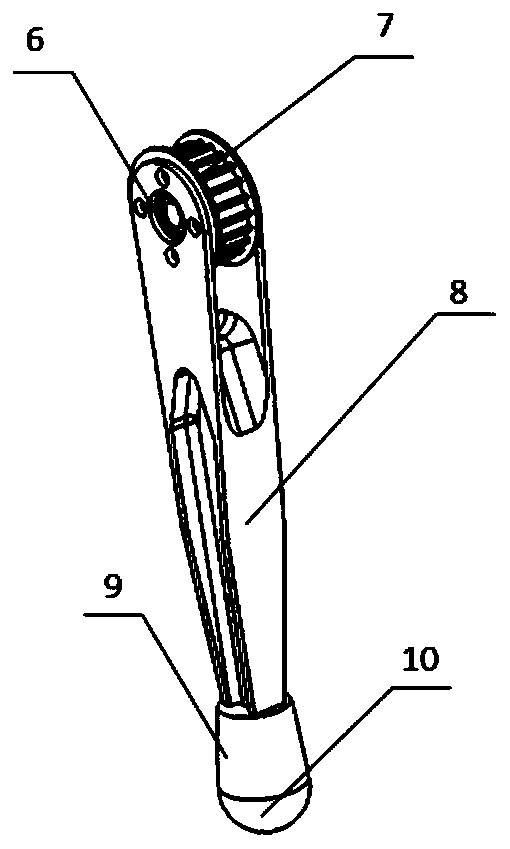
[0058] The tibial joint 4 includes a support rod 8 and a first pulley 7, one end of the support rod 8 is provided with a first pulley 7 through a pulley installation shaft, and the other end is fixedly connected to the foot end 5;
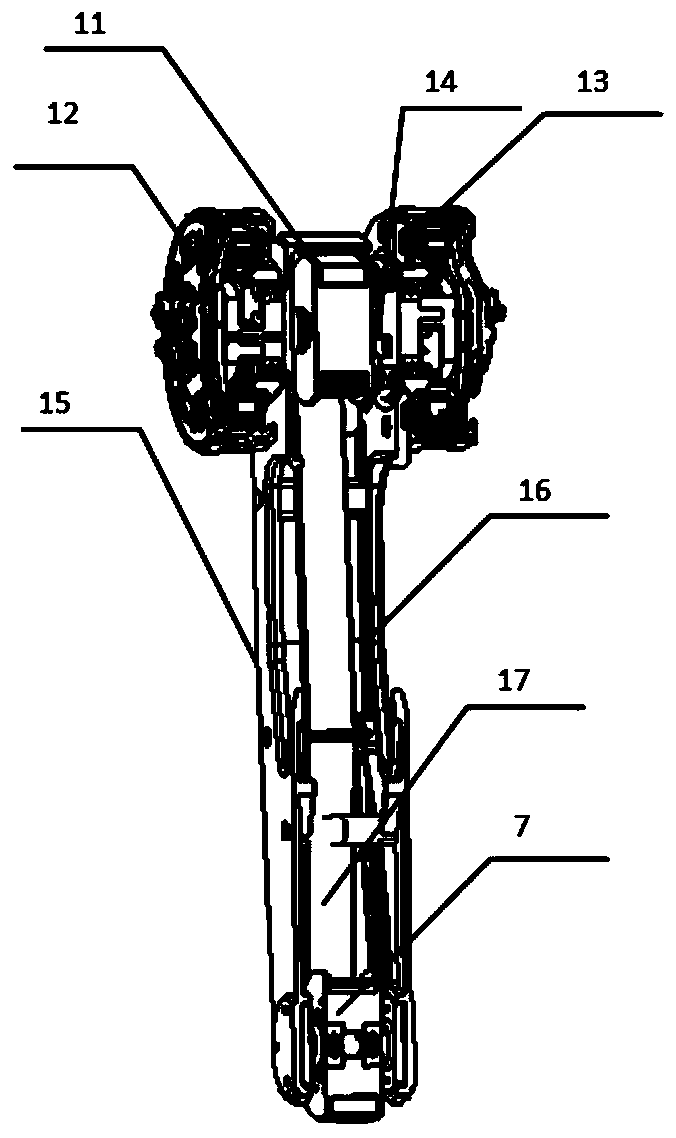
[0059] Ankle joint module 3 comprises support housing, synchronous belt 17, first motor 12, second motor 13, second pulley 11 and second motor output shaft 14; One end of support housing and support rod 8 are provided with first belt One end of the wheel 7 is hinged, and the other end of the support housing is fixedly provide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com