

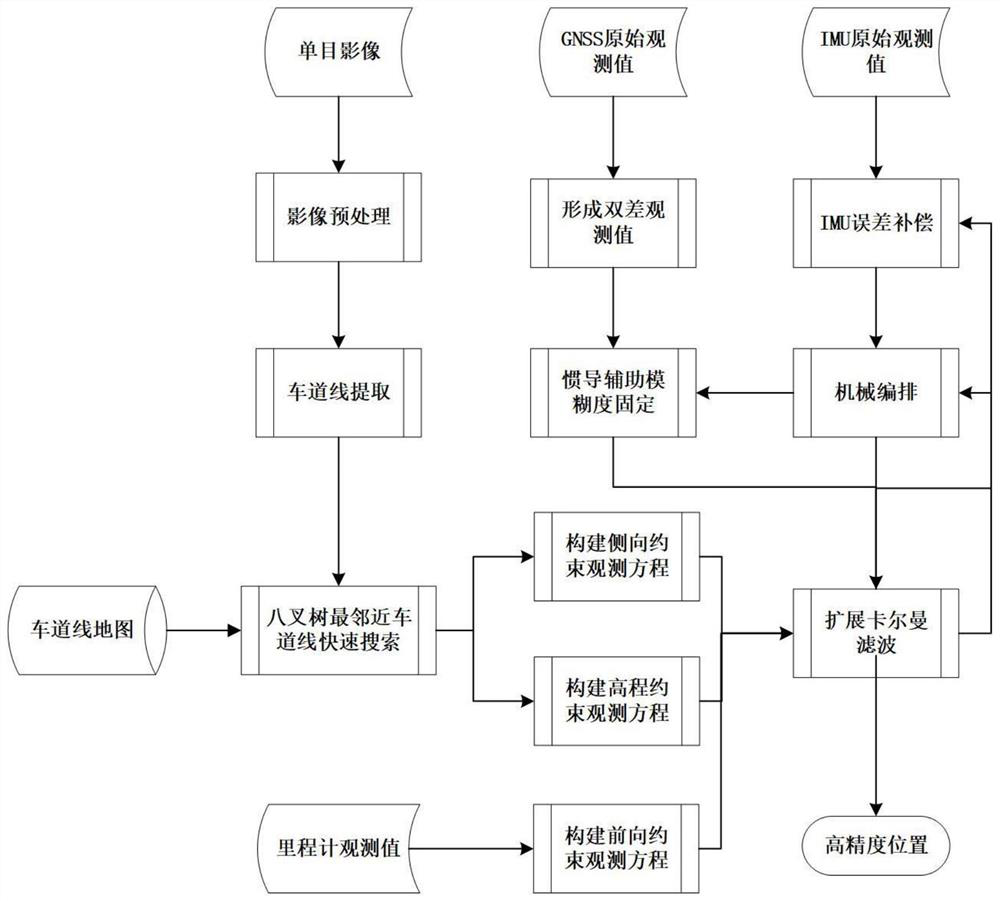
A GNSS/inertial navigation/lane line constraint/odometer multi-source fusion method
A fusion method and lane line technology, applied in road network navigators, radio wave measurement systems, satellite radio beacon positioning systems, etc., can solve problems such as unpredictable, complex and changeable urban environments, and achieve low cost and convenient application , The effect of flexible positioning means
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
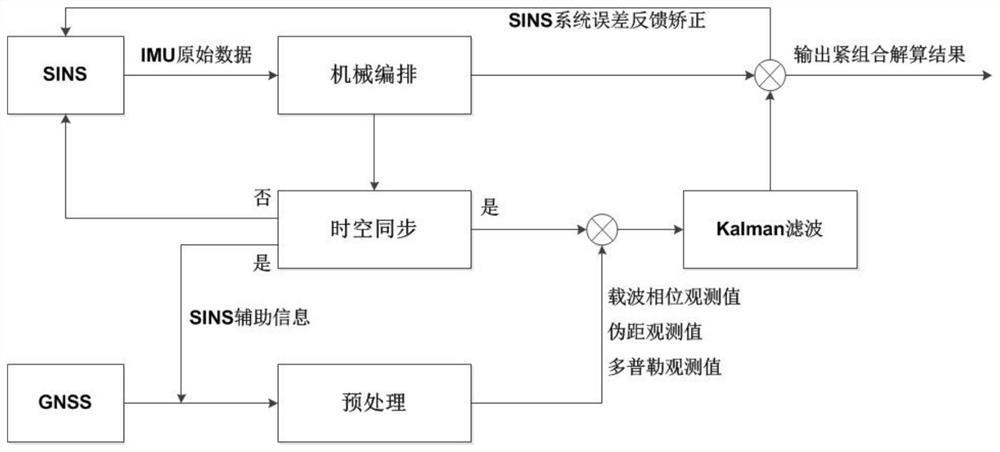
[0055] The overall filtering framework of the present invention is GNSS / INS tight combination extended Kalman filter, and the tight combination structure is as follows figure 2 As shown, the navigation coordinate system is selected as the ECEF system, and the corresponding SINS mechanical layout is also carried out under the ECEF system. In the tight combination, the original observations of GNSS and SINS are jointly input into a Kalman filter, and the navigation parameters (position, velocity and attitude), SINS system error and GNSS related parameters (ambiguity) are jointly estimated, and the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More