

Rope-driven three-degree-of-freedom training robot
A rope-driven, degree-of-freedom technology, applied in the field of intelligent robots, can solve the problems of large economic burden on patients, lack of objective and effective evaluation of training parameters, etc., and achieve the effect of improving flexibility, friendly human-computer interaction, and comfortable rehabilitation training process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be described in detail below, but the protection scope of the present invention is not limited to the embodiments.
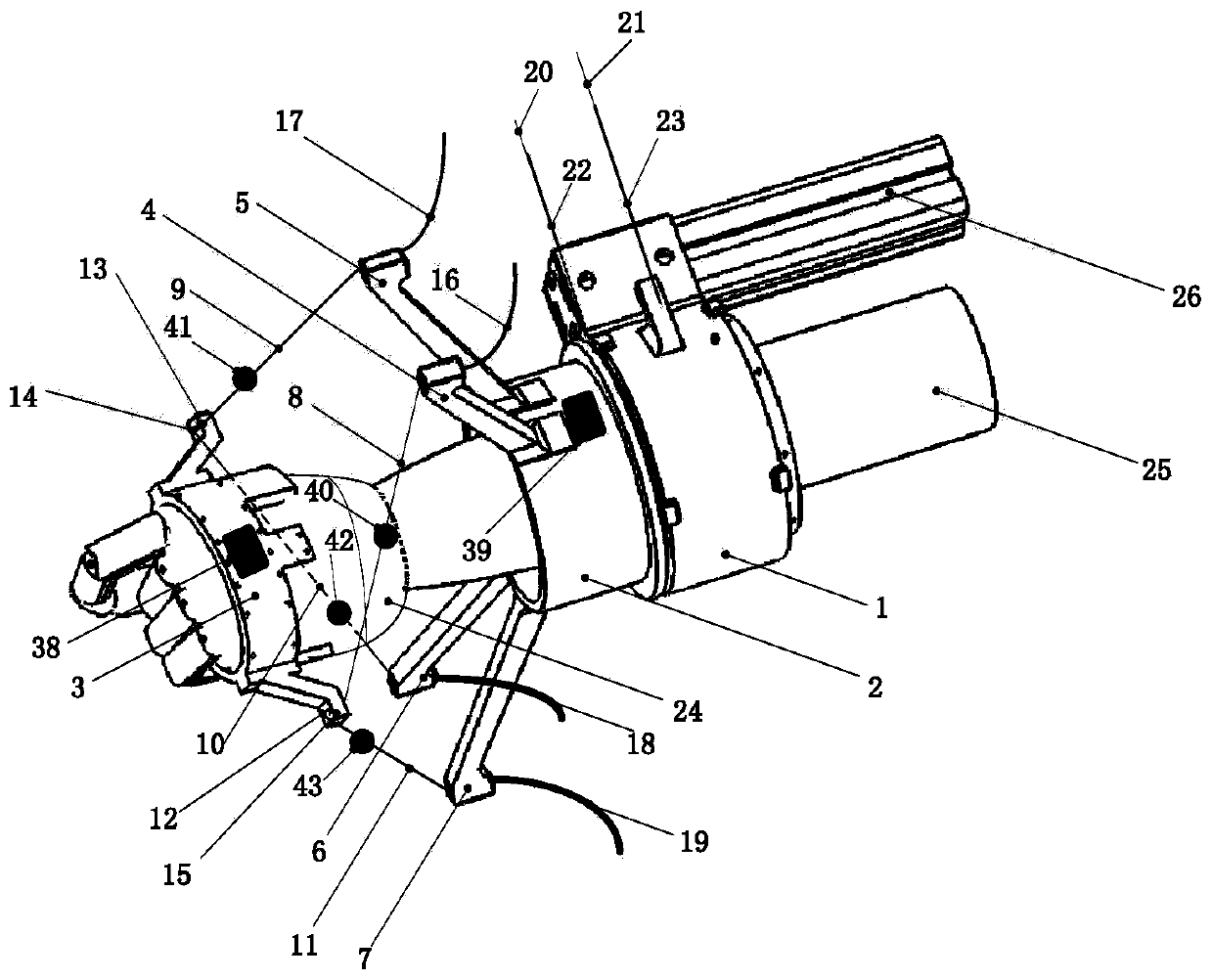
[0021] Such as Figure 1 to Figure 3 As shown, a rope-driven three-degree-of-freedom training robot in this embodiment includes a robot body and an active and passive hybrid drive system: the robot body includes an outer forearm ring 1 , an inner forearm ring 2 and a hand ring 3 . Wherein, the forearm outer ring 1 is fixed on any bracket 26 , and the forearm inner ring 2 is sleeved in the forearm outer ring 1 and can rotate relative thereto.
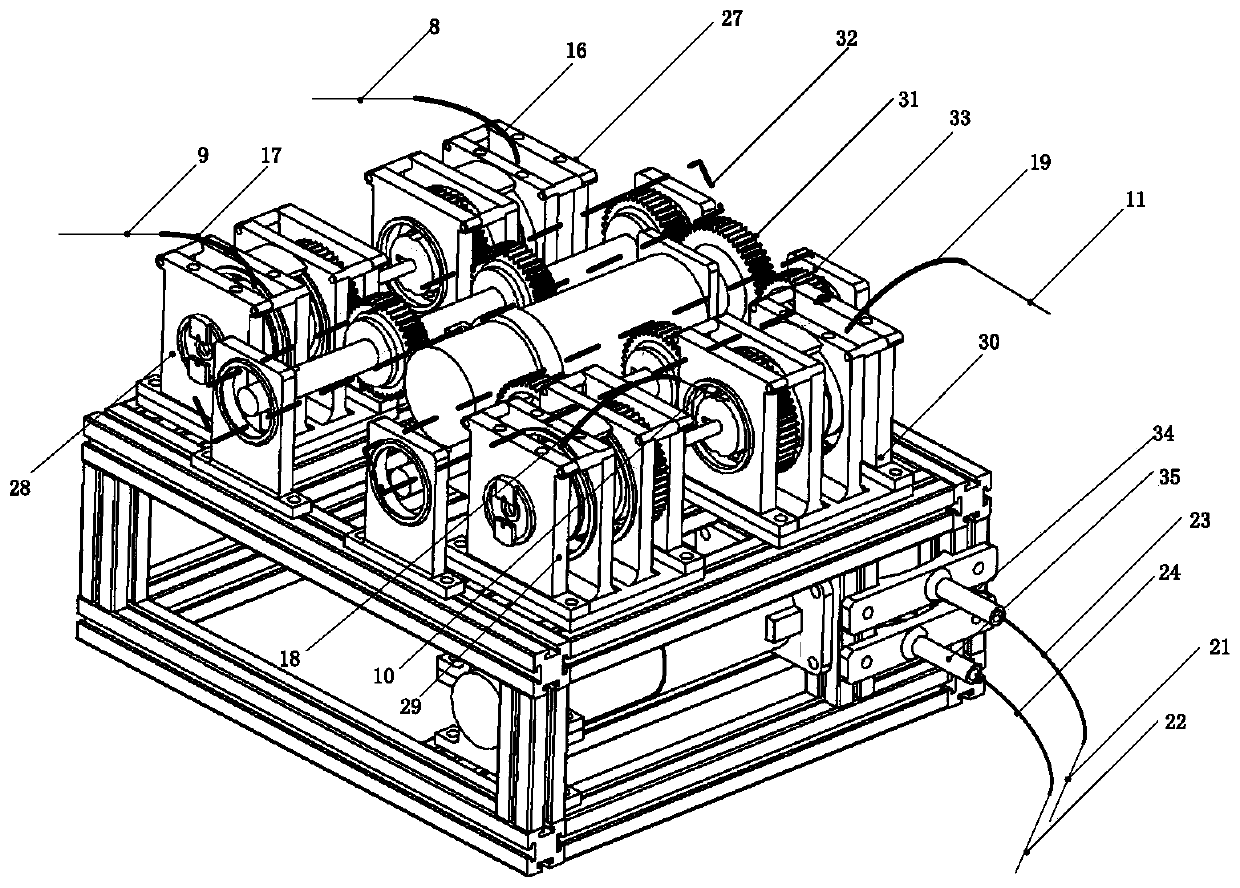
[0022] The hand ring 3 links to each other with the forearm inner ring 2 by the first driving rope 8, the second driving rope 9, the third driving rope 10, and the fourth driving rope 11, and the four driving ropes respectively extend from the first extension arm 4, the second Extension arm 5, the 3rd extension arm 6, the 4th extension arm 7 line holes enter alo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More