

Obstacle avoidance path planning method based on convex set calculation and optimized ant colony algorithm
A path planning and ant colony algorithm technology, applied in the field of obstacle avoidance path planning, can solve problems such as easy to fall into local optimal solution, slow convergence speed of ant colony algorithm, easy to stagnate and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to make the object, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0065] Such as Figure 13 A method of obstacle avoidance path planning based on convex set calculation and optimized ant colony algorithm shown, the method includes the following steps:
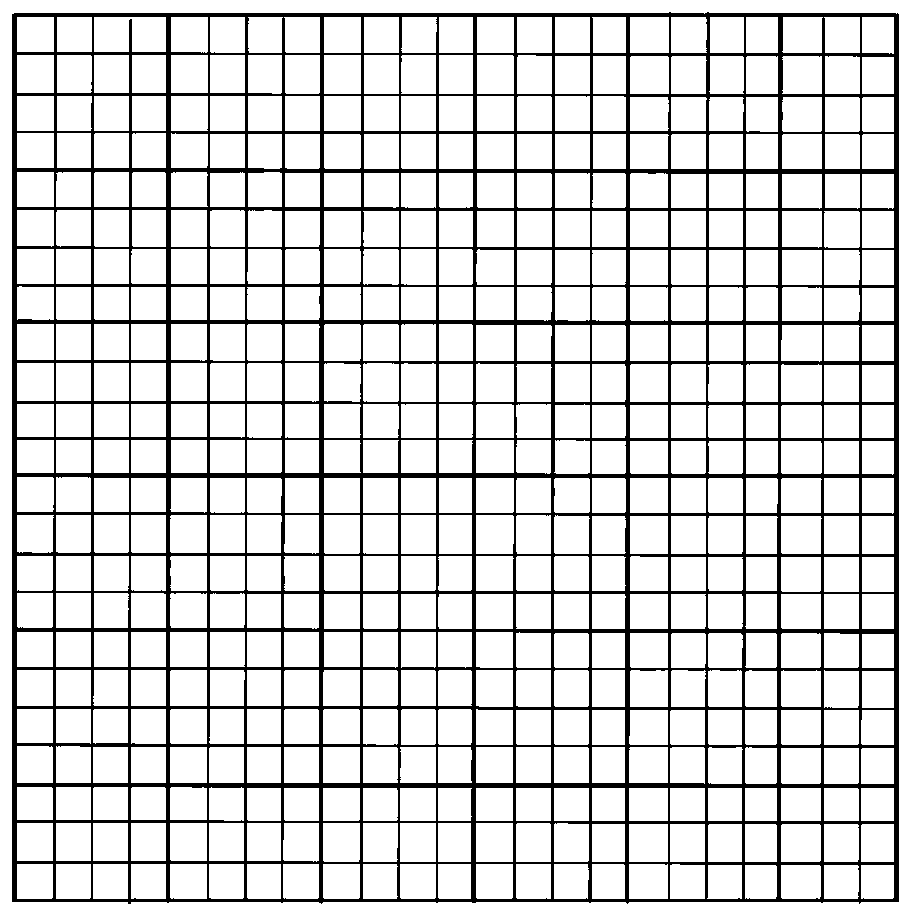
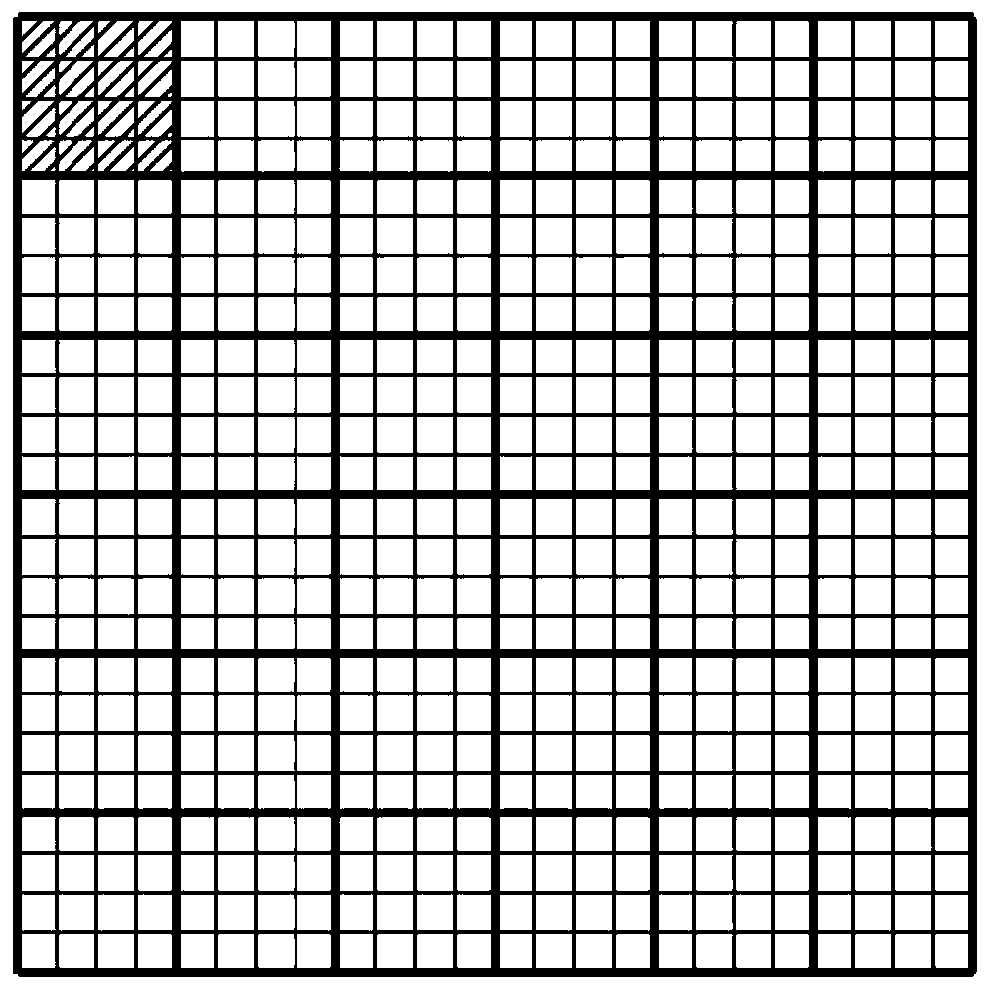
[0066] S1. Divide the environment where obstacles are located into grids to generate such as figure 1 and figure 2 The dense obstacle environment map shown;
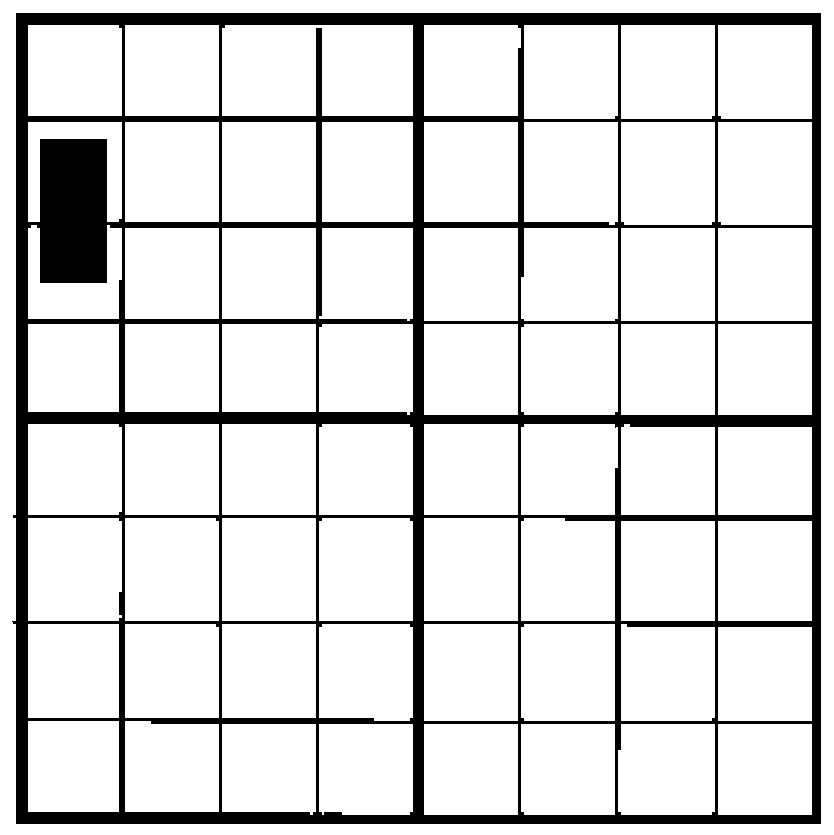
[0067] The obstacle is a rectangle whose sides are parallel to the x and y axes, image 3 As shown in , use the coordinates of the upper left vertex and the lower right vertex of the obstacle to represent the fixed point information of the obstacle;
[0068] According to the generation probability of random uniform distribution, in the dense obstacle environment map, the generated obstacles are select...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More