

Method for estimating target motion information based on seeker measurement information
A technology for measuring information and motion information, which is applied in navigation calculation tools, navigation through speed/acceleration measurement, projectiles, etc., can solve problems such as complex space-time registration calculations, maneuvering, and decreased accuracy of prediction information to achieve convenient engineering application, high estimation accuracy, and efficient calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
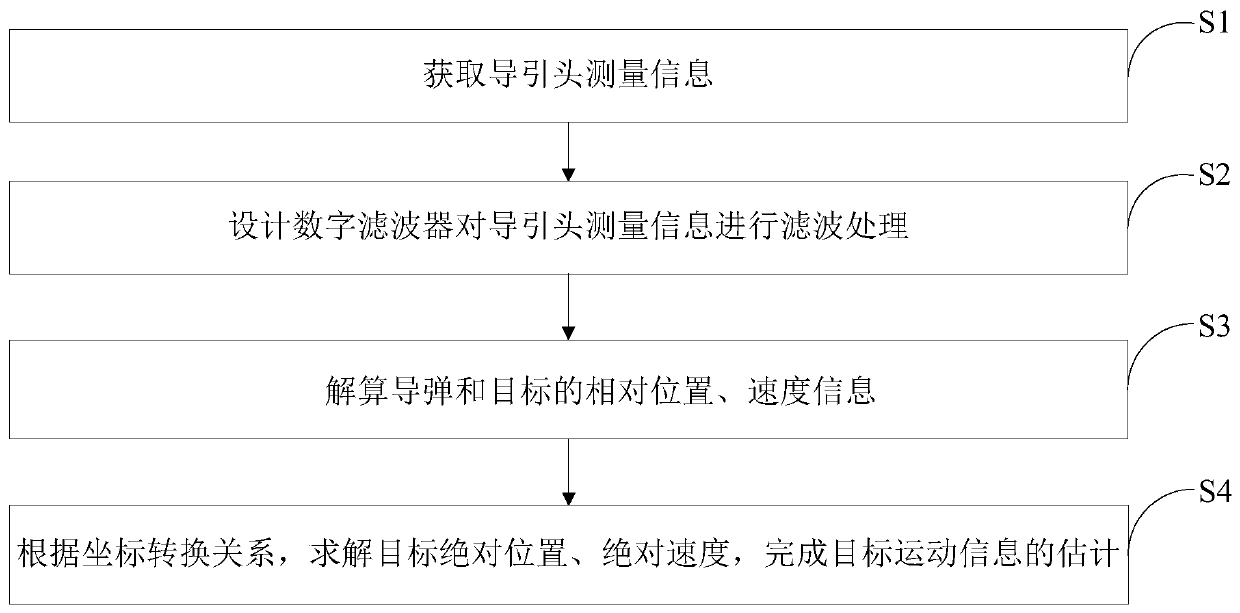
[0031] Such as figure 1 As shown, a method for estimating target motion information based on seeker measurement information includes the following steps:
[0032] S1. Obtain seeker measurement information
[0033] According to the feedback of the measuring device on the seeker, the relative motion information of the missile and the target such as line-of-sight angle and line-of-sight angular velocity are obtained.
[0034] S2. Design a digital filter to filter the relative motion information of the missile and the target.
[0035] A digital filter is expressed as:
[0036] y(k)=-A 1 y(k-1)+B 0 u(k)+B 1 u(k-1)
[0037]
[0038]
[0039] In the formula, u represents the input of the digital filter, and its physical meaning is that the seeker measures the inertial line of sight angle, the inertial line ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More