

Robot infrared laser locating motion track planning method
An infrared laser and trajectory planning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of perception, poor adaptability, low efficiency, poor variability, etc., to improve adaptability, improve trajectory accuracy, positioning precise effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
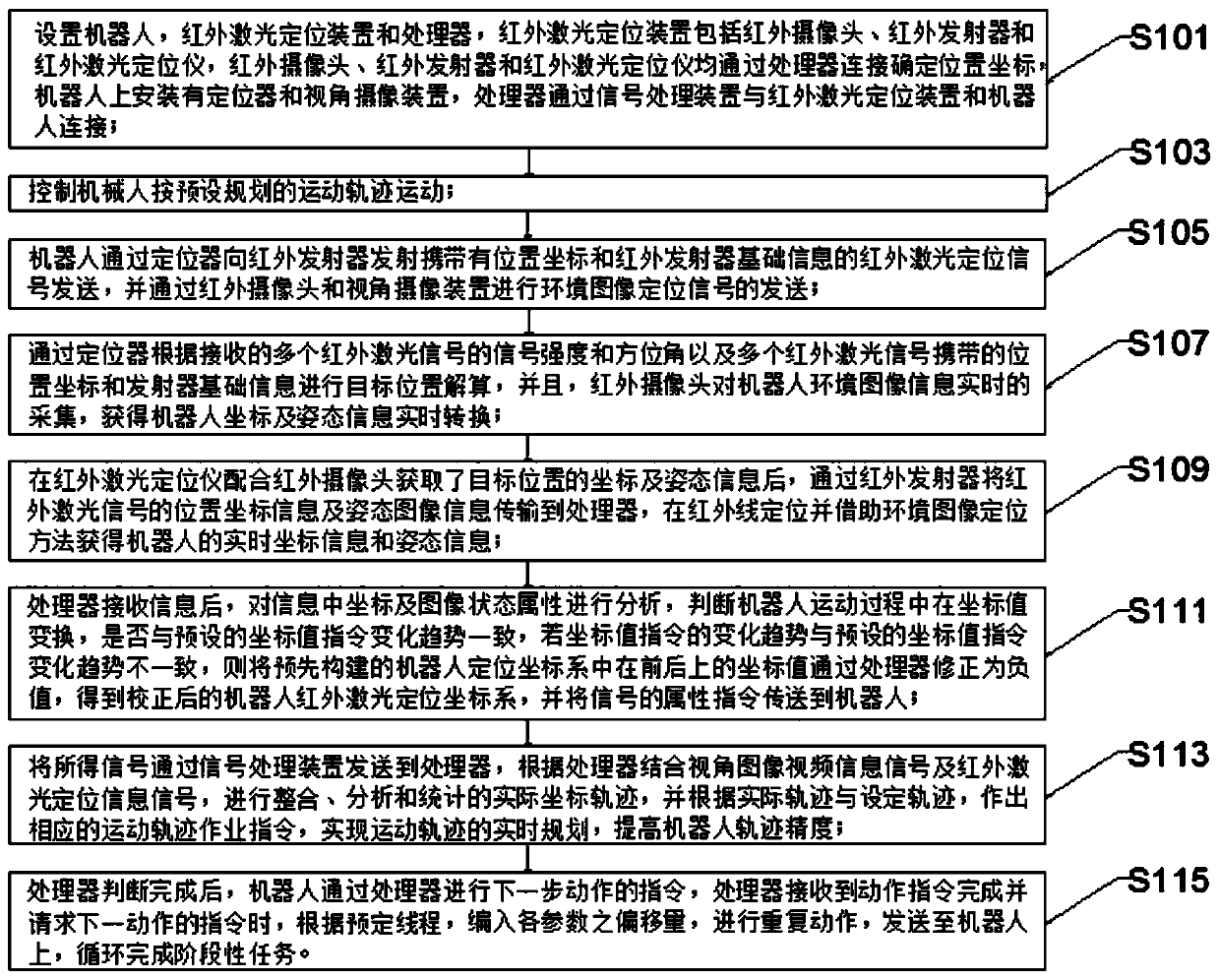
[0029] Such as figure 1 As shown, the robot infrared laser positioning motion trajectory planning method according to the embodiment of the present invention includes the following steps
[0030] Step S101, setting up the robot, the infrared laser positioning device and the processor, the infrared laser positioning device includes an infrared camera, an infrared transmitter and an infrared laser locator, and the infrared camera, the infrared transmitter and the infrared laser locator are all connected through the processor to determine the position coordinates , the robot is equipped with a locator and a viewing angle camera device, and the processor is connected with the infrared laser positioning device and the robot through a signal processing device;
[0031] Step S103, controlling the robot to move according to the preset planned motion trajectory;
[0032] Step S105, the robot transmits an infrared laser positioning signal carrying position coordinates and basic informa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More