

Lower-limb exoskeleton robot with four-connecting-rod knee joints
An exoskeleton robot, knee joint technology, applied in manipulators, program-controlled manipulators, joints, etc., can solve the problems of poor bionic characteristics and motion performance, complex length adjustment device structure, and high cost, and achieve the effect of improving wearability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
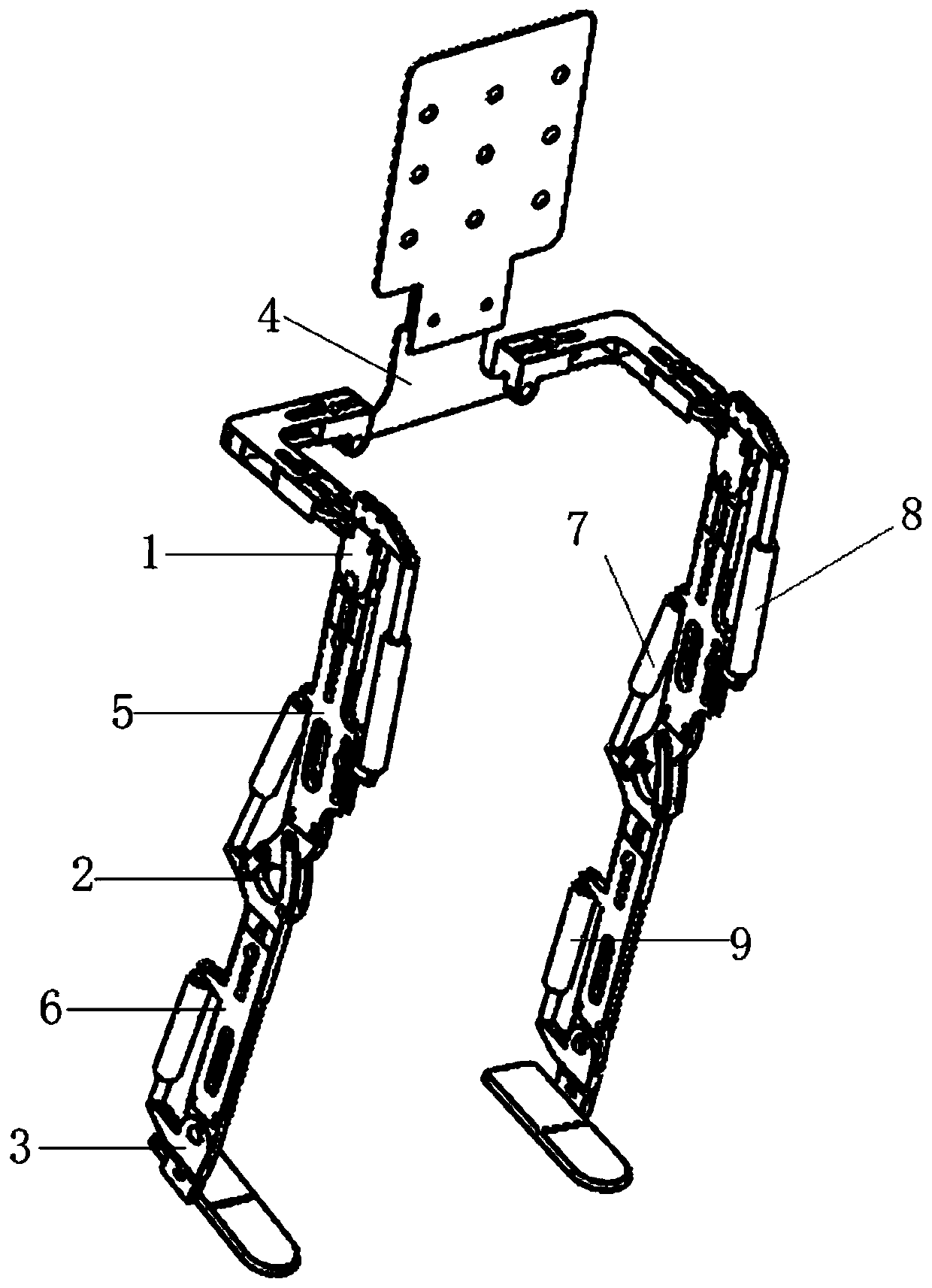
[0042] In one or more embodiments, a lower limb exoskeleton robot with a four-link knee joint is disclosed, such as figure 1 As shown, it includes: hip joint 1, knee joint 2, ankle joint 3, waist connecting part 4, thigh supporting part 5 and calf supporting part 6; wherein, hip joint 1 is connected with knee joint 2 through thigh supporting part 5, and knee joint 2 is connected to the ankle joint 3 through the calf support 6, and the left and right hip joints 1 are connected through the waist connection 4; the hip joint 1 is provided with a second drive device 8 for driving the thigh support 5, and the knee joint 2 is provided with a drive The first driving device 7 of the calf support 6 is provided with a third driving device 9 for driving the ankle joint 3 on the calf support 6, and the positions of the above driving devices can be adjusted according to actual needs.
[0043] Such as Figure 5As shown, the waist connector 4 includes a back resting plate 401, an upper hinge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More