

Novel hole-drilling image collecting robot and application method thereof
An image acquisition and robotic technology, applied in manipulators, manufacturing tools, etc., can solve the problems of the lens without any anti-fog treatment and anti-collision protection, the pause of image acquisition and the long acquisition time, and the inability to clean up in the borehole. Guaranteed continuity and integrity, full-featured, time-saving effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solution of this patent will be further described in detail below in conjunction with specific embodiments.
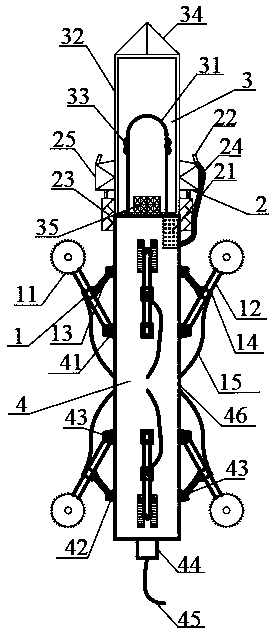
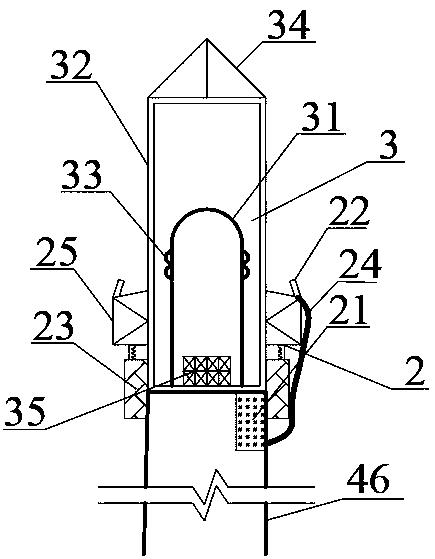
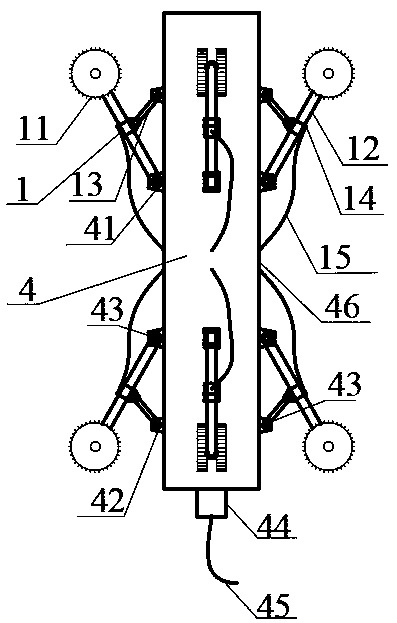
[0041] A novel drilling image acquisition robot includes a self-advancing device 1, a cleaning device 2, an acquisition device 3, a connecting device 4 and a control device 5; the self-advancing device 1 is installed on the outside of the connecting device to provide the present invention with a Power; the cleaning device 2 is installed in the middle of the collection device 3 and the connection device 4, and can clean the protective shell 32 of the present invention to ensure the clarity of image collection; the collection device 3 is installed on the top of the connection device 4 and is The rock formation image acquisition part of the present invention; the connection device 4 connects the various parts of the present invention; the control device 5 can send instructions to control the present invention to implement the image acquisition function...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More