

Pig farm inspection robot based on UWB positioning
A technology for inspection robots and robots, which is applied in manipulators, manufacturing tools, etc., can solve the problems that robots cannot perform intelligent inspections and real-time adjustments, and achieve the effects of safe, fast and intelligent inspections, high cost performance, and reduced walking errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
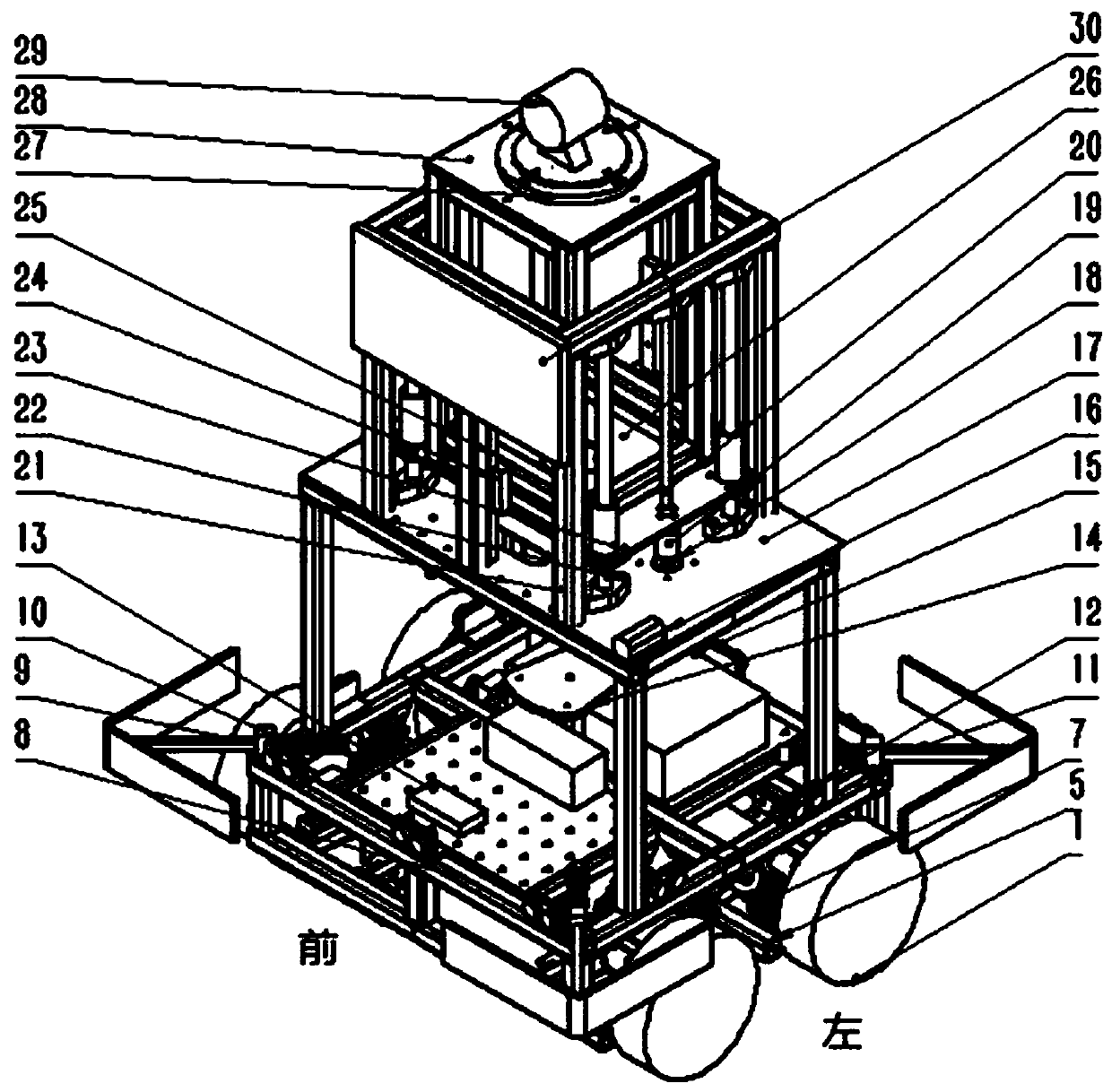
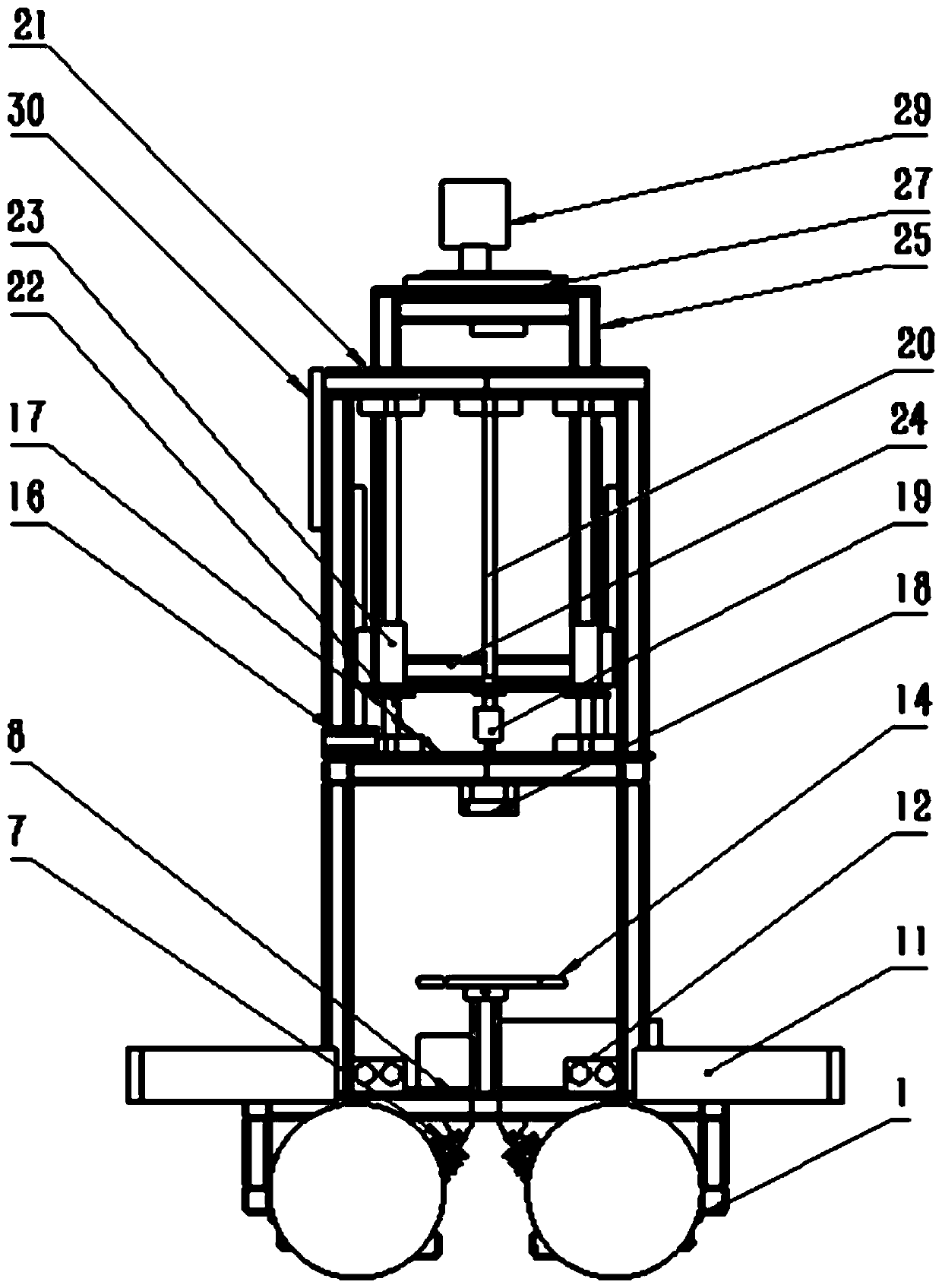
[0041] The invention discloses a pig farm inspection robot based on UWB positioning, such as Figure 1 to Figure 8 As shown, it includes a robot body, a shock-absorbing walking mechanism, an obstacle avoidance mechanism 11, an ultrasonic obstacle avoidance system, a UWB positioning system, a monitoring camera system, and a main control system, wherein:
[0042] 1. Robot body
[0043] The robot body includes a chassis 8, a support plate 17 is installed on the top of the chassis 8, and a stand 21 is arranged above the support plate 17; wherein, the bottom of the chassis 8 is used to install a shock-absorbing walking mechanism, and the top of the chassis 8 is used to install an obstacle avoidance mechanism 11 , ultrasonic obstacle avoidance system, UWB positioning system and main control system etc.; In this embodiment, the supports and stand 21 are all rectangular frame structures.
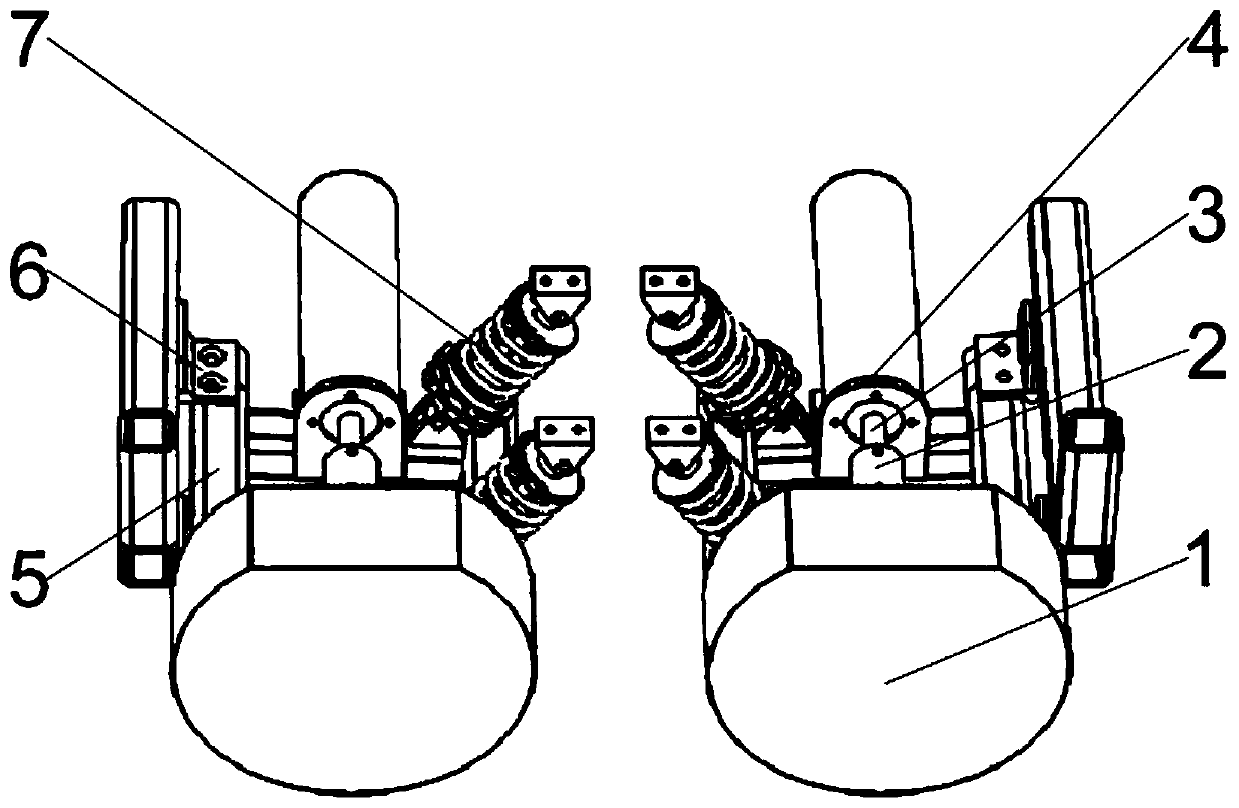
[0044] 2. Shock-absorbing walking mechanism
[0045] The shock-absorbing running mechanism in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More