

A rotary manipulator for machining
A mechanical processing and rotary technology, applied in the field of manipulators, can solve problems such as affecting life and cost control, short life of pressure sensors, and difficult jaw clamping, etc., to improve gripping ability and gripping stability, improve gripping Take the effect of constant efficiency and transmission ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
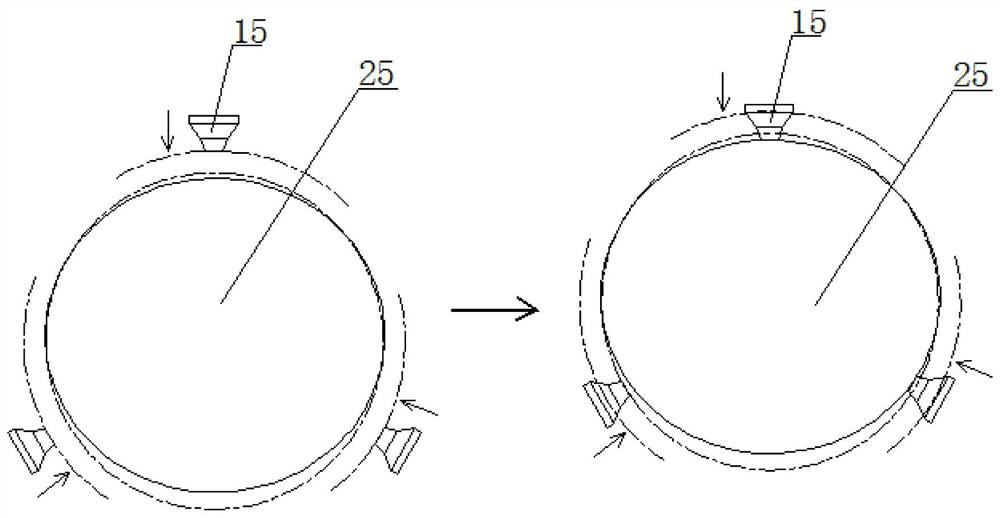
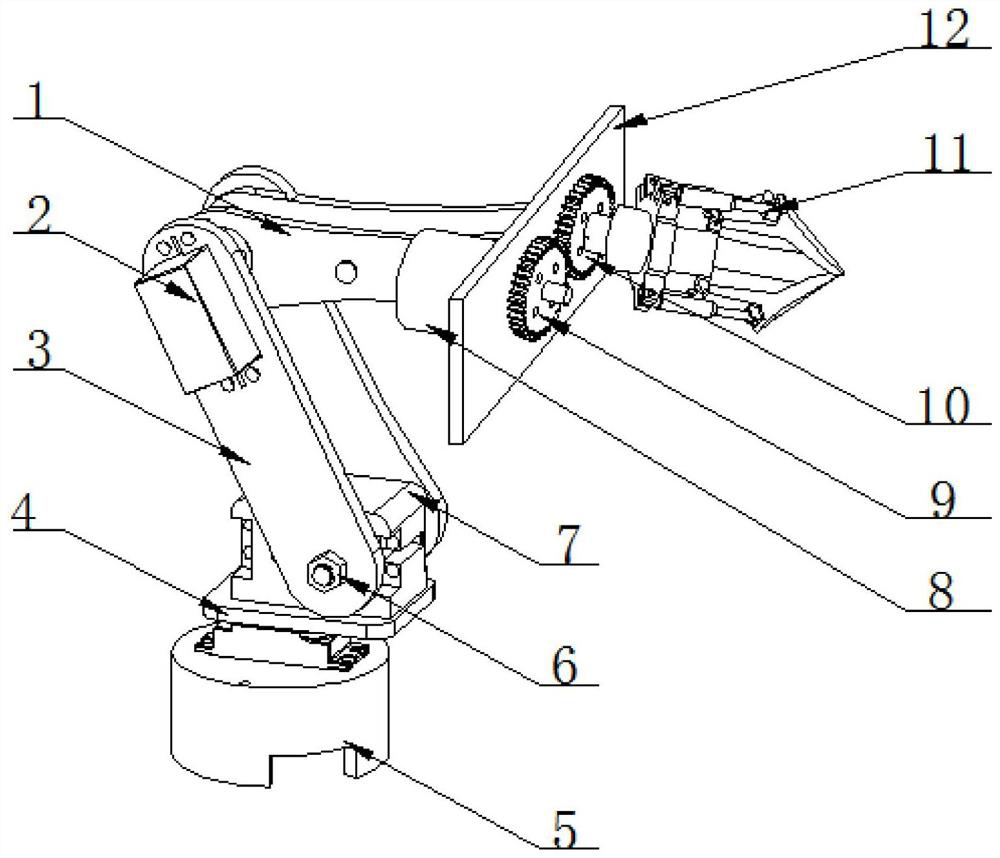
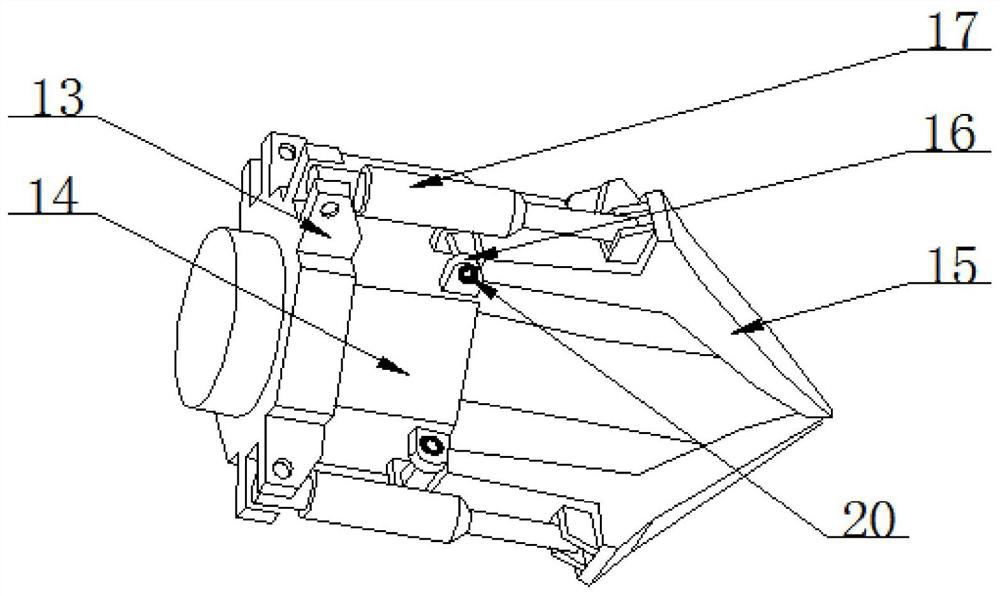
[0030] see Figure 2-5 , in an embodiment of the present invention, a rotary manipulator for mechanical processing, including a mechanical arm mechanism and a grasping mechanical claw 11, wherein three sets of circular arrays of the grasping mechanical claws 11 are installed and connected to the connecting plate 12 , the connecting plate is fixedly installed on the output end of the mechanical arm mechanism; each group of grabbing mechanical claws 11 is driven by a separate cylinder 17, so that the clamping jaws 15 of each grabbing mechanical claw 11 can be realized by the cylinder. action; it is characterized in that an angle detection assembly 20 is provided at the hinge of the end of the clamping jaw away from the clamping end, and the angle detection assembly 20 can detect the rotation angle of the clamping jaw at all times; A controller connected to the detection assembly 20, the controller independently controls each cylinder;
[0031] When grabbing the workpiece 25, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More