

Point cloud registration method based on convolution restricted Boltzmann machine
A technology limited to Boltzmann machine and point cloud registration, applied in neural learning methods, image analysis, image enhancement, etc., can solve the problems of lack of registration accuracy and speed, achieve high-precision recognition, improve application efficiency and Field of application, effect of promoting further development
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] For further elaborating the present invention in more detail, below will be described in more detail in conjunction with accompanying drawing:
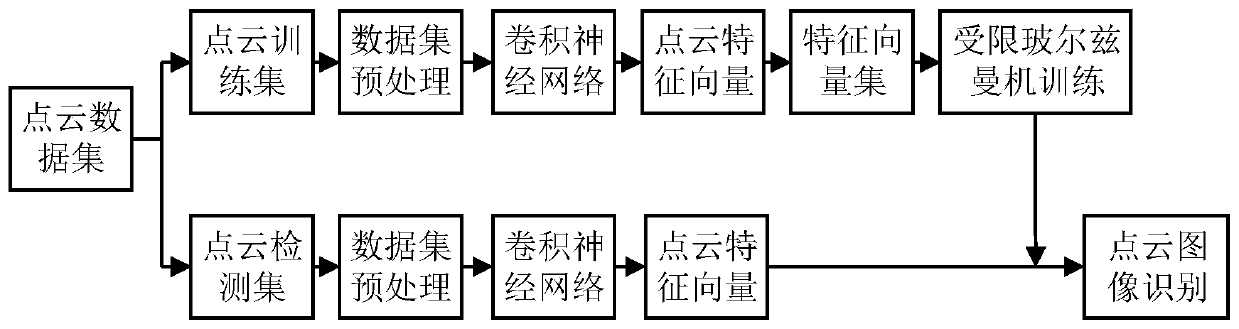
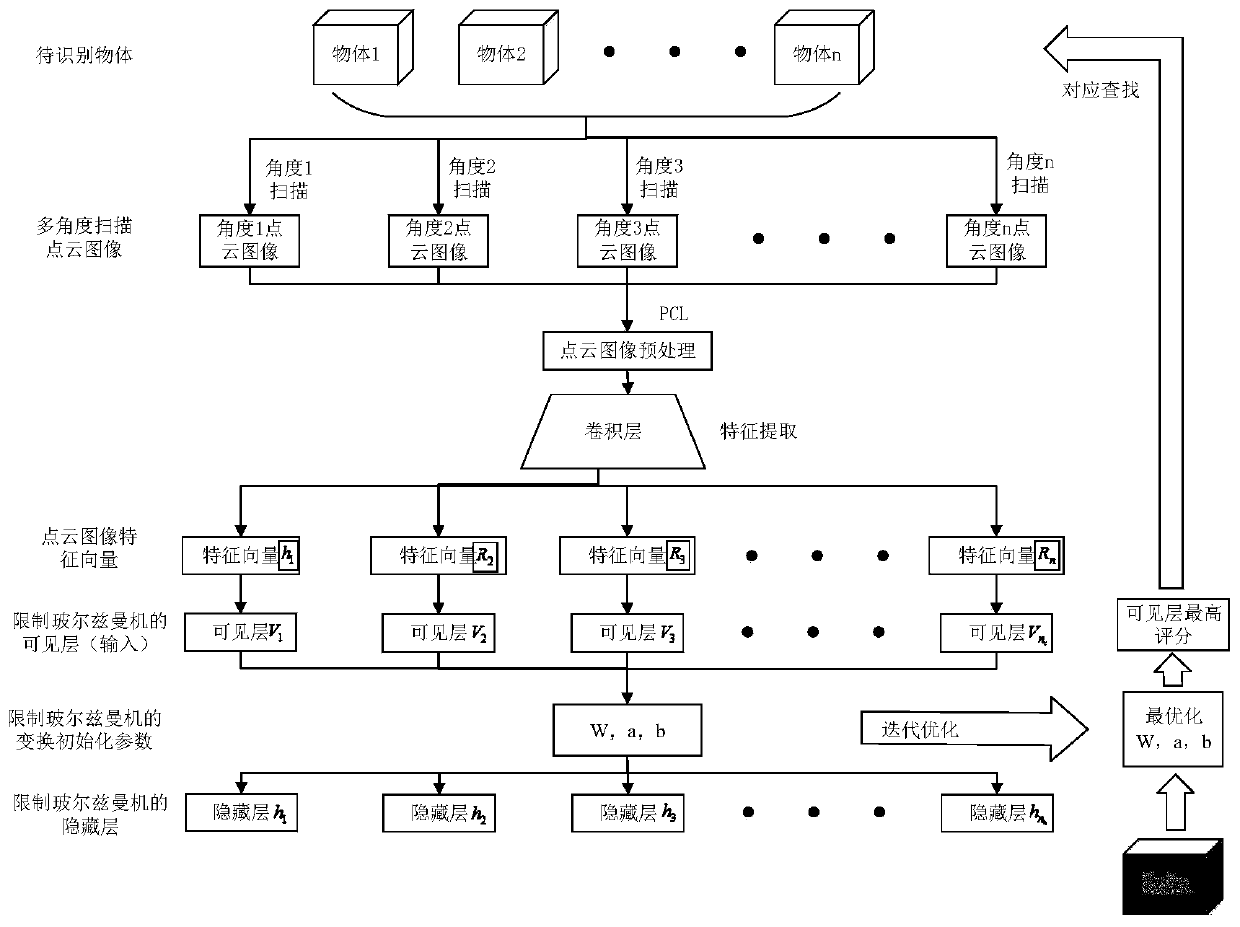
[0018] refer to figure 1 and figure 2 , this embodiment includes the following steps:
[0019] 1) Use a 3D scanner to scan k objects to be detected from multiple angles to obtain k sets of multi-angle point cloud image data files, and then preprocess the obtained point cloud images through the point cloud library (PCL), mainly including Segmentation, filtering, down-sampling and other steps to remove noise in the scanning process and useless point cloud images of objects other than the object to be detected in the image.
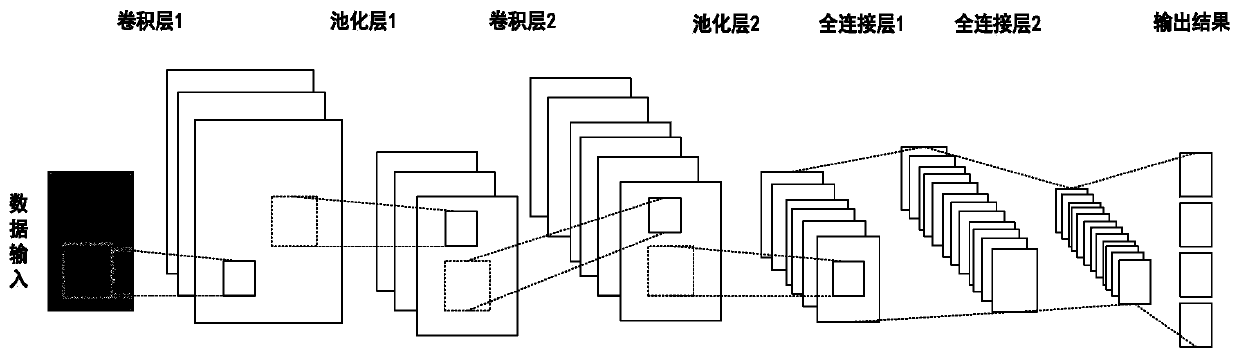
[0020] 2) Build a convolutional neural network, such as image 3 As shown, it mainly includes two convolutional layers, two pooling layers, and two fully connected layers, each of which has multiple feature maps, each feature map includes multiple neurons, and the feature map passes through a volume The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More