

Optical radar-based driving assisting method
A technology of driving assistance and radar, applied in the field of driving assistance based on optical radar, can solve problems such as vehicle real-time position error, signal blocking or interference, error, etc., and achieve the effect of improving accuracy and reducing the amount of calculation and error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
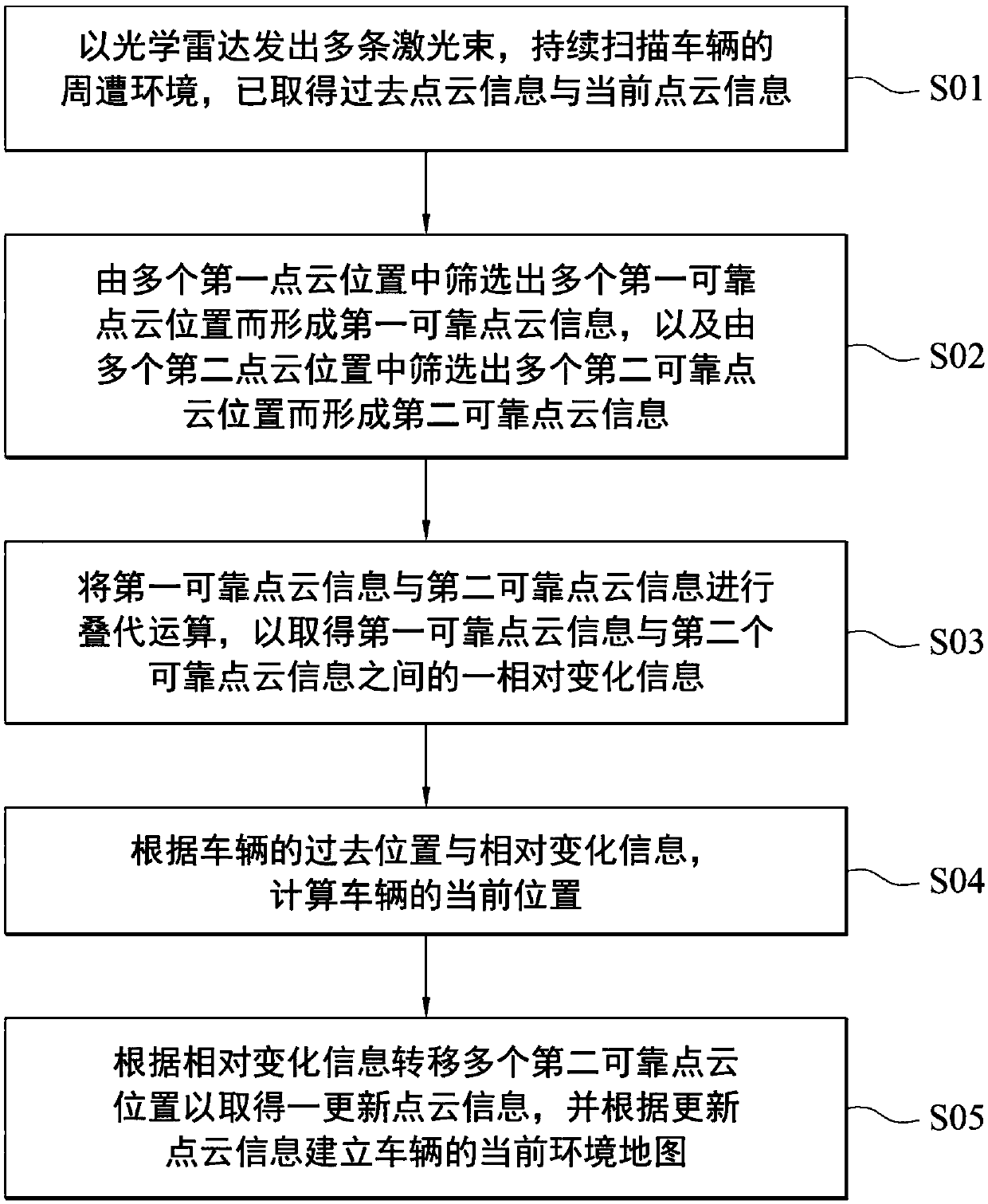
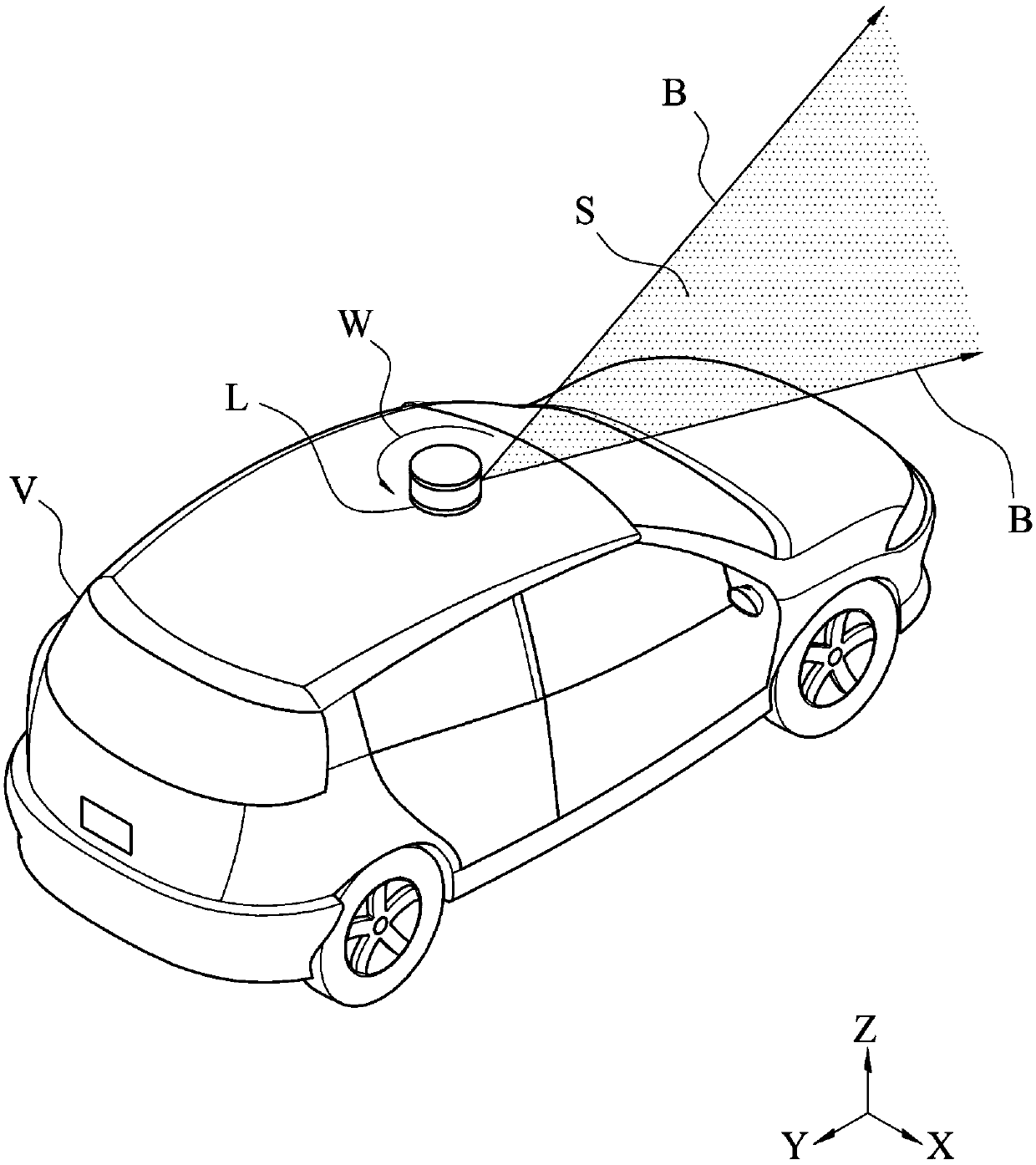
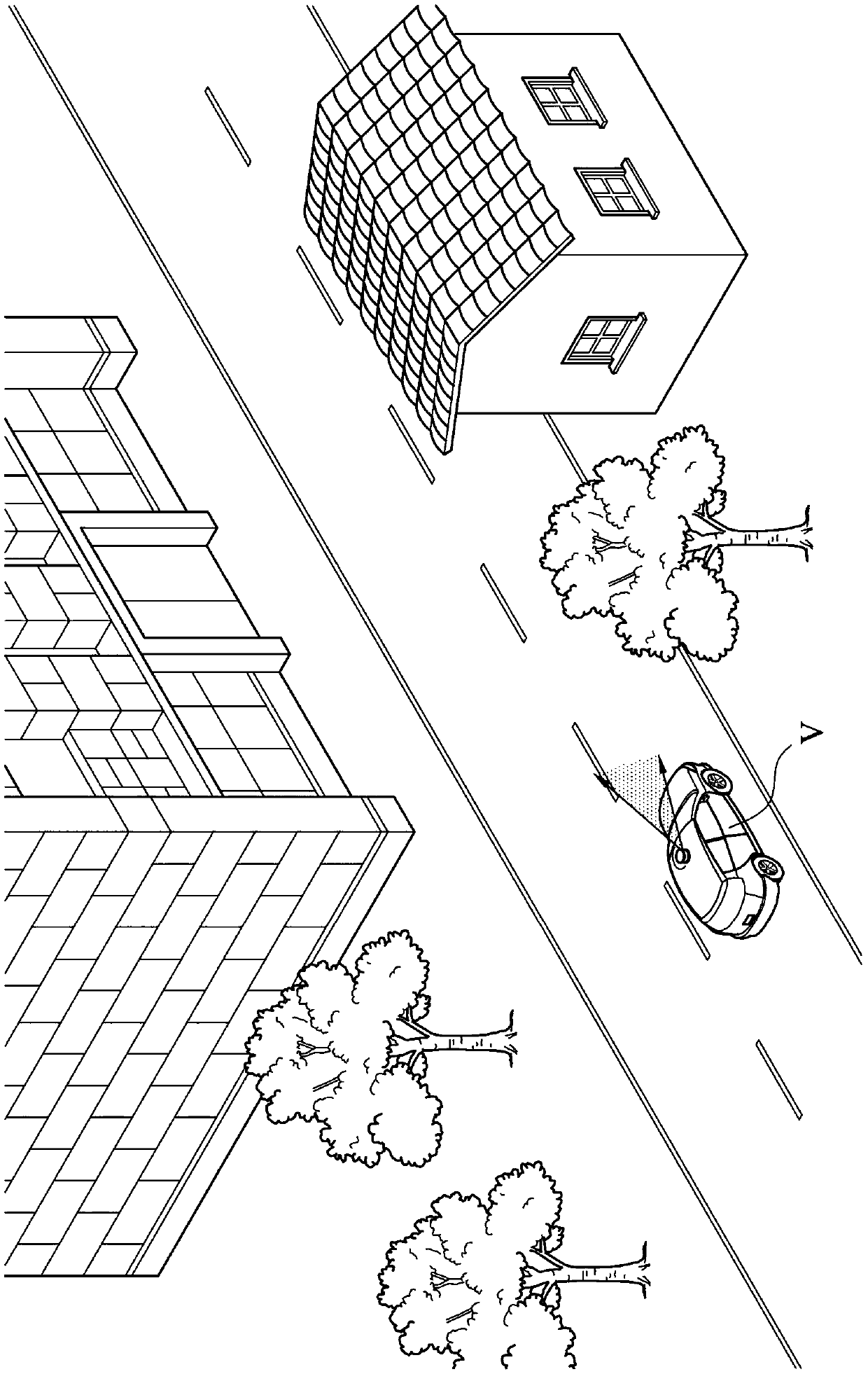
[0044] figure 1 It is a flowchart of the steps of an embodiment of the driving assistance method of the present invention. Such as figure 1 As shown, the driving assistance method of this embodiment is to continuously scan the surroundings of the vehicle V through the optical radar L to obtain point cloud (point cloud) information, and the point cloud information is processed and calculated to obtain an accurate environmental map and the location of the vehicle in the environment. The location in the map is used for various vehicle applications, such as navigation route planning, Internet of Vehicles, map data establishment or automatic driving, etc. Such as figure 1 As shown, the driving assistance method of this embodiment includes step S01 to step S05.
[0045] Firstly, step S01 can be performed: using a light detection and ranging (Lidar) to emit multiple laser beams B to continuously scan the surrounding environment of the vehicle V to obtain past point cloud informati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More