

Device for improving hip joint extension assisting efficiency of flexible exoskeleton robot
An exoskeleton robot and hip joint technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of insufficient safety and low power assist efficiency of Bowden lines, so as to improve the efficiency of walking assist, increase the angle, reduce the The effect of pressure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The following will clearly and completely describe the technical solutions in the embodiments of the present invention in conjunction with the accompanying drawings in the embodiments of the present application. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
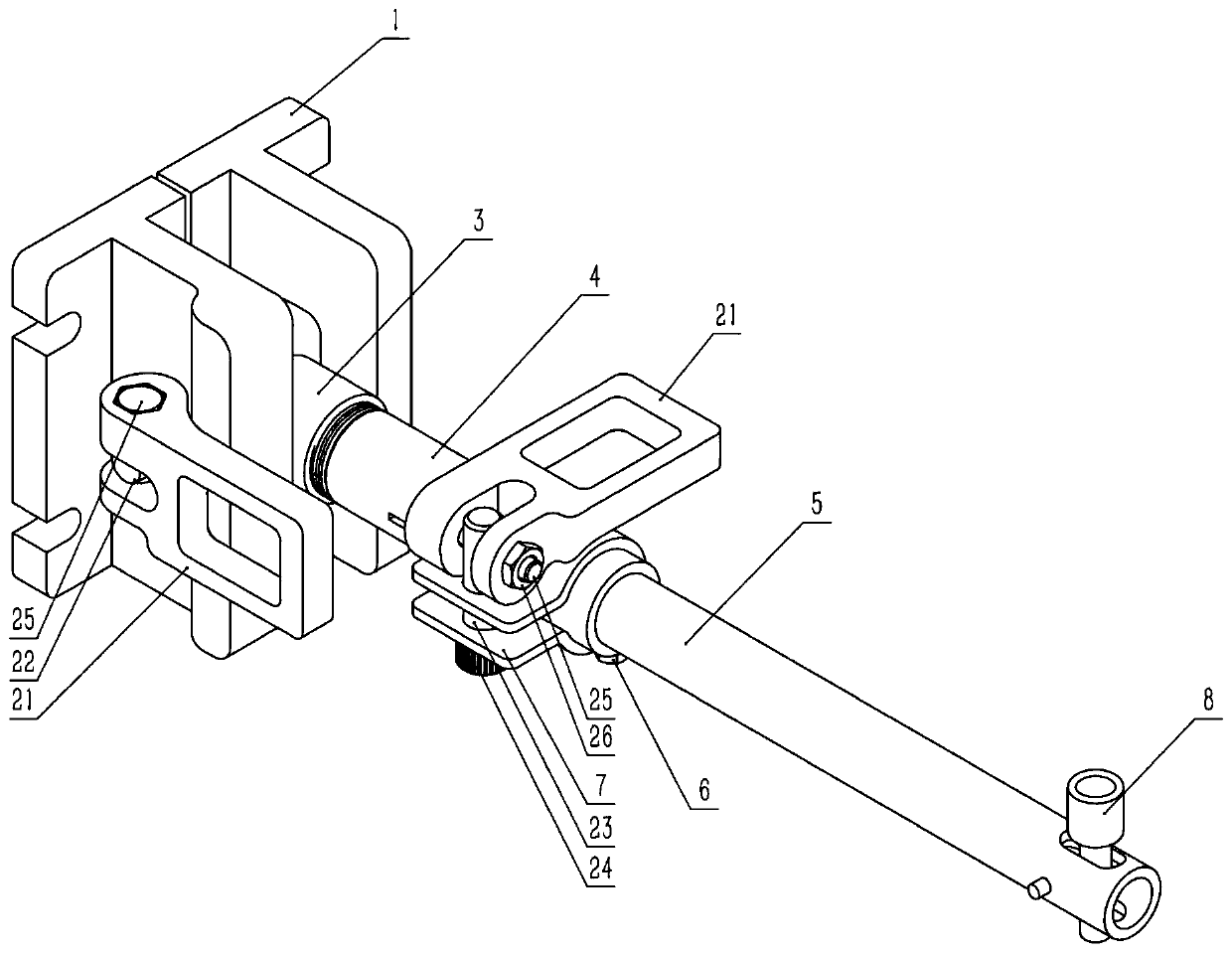
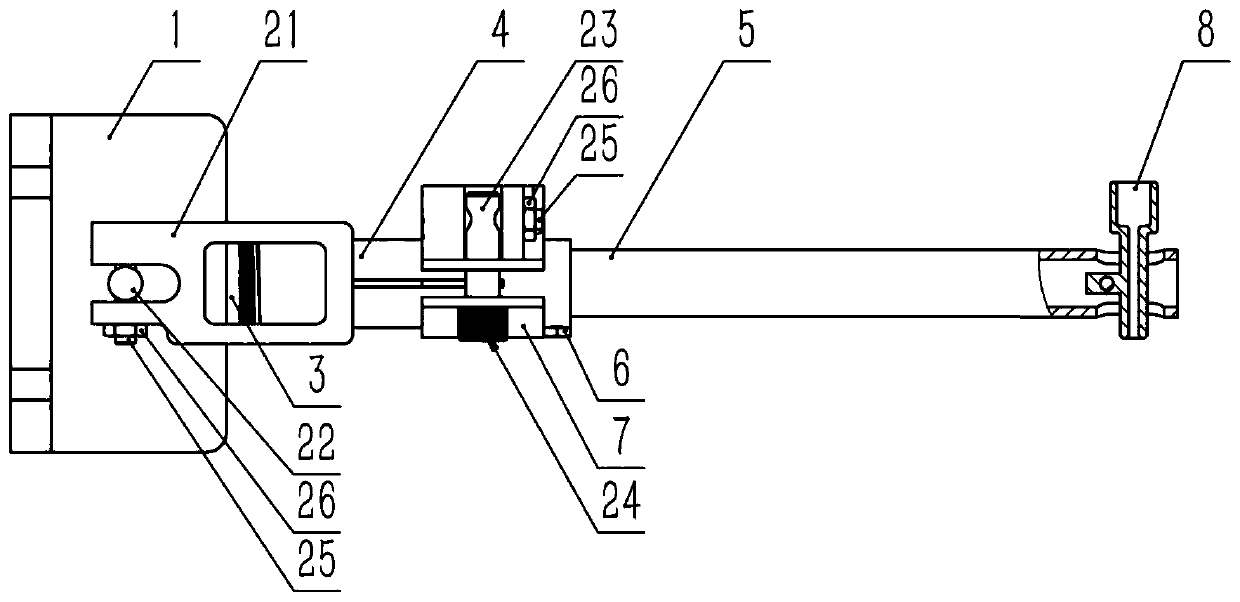
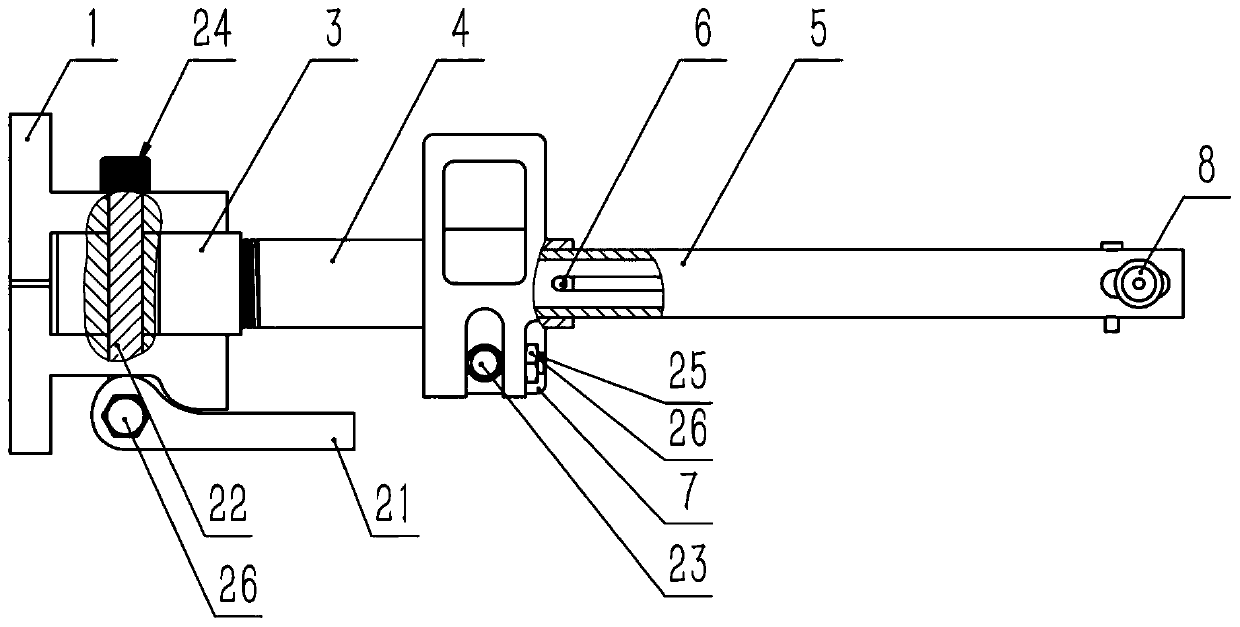
[0019] The invention provides a device (referred to as the device) for improving the efficiency of the hip joint extension and boosting of a flexible exoskeleton robot. Rod inner rod (5), telescopic rod limit screw (6), telescopic rod locking sleeve (7), Bowden wire guide tube (8). One end of the rotating block (3) is installed inside the base (1) through a cam-like pressing rod mechanism, and the other end is connected to one end of the tele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More