Robot positioning method and device
A robot positioning and pose technology, applied in the direction of navigation calculation tools, etc., can solve the problems of low robot precision and the inability of robots to complete tasks more accurately, and achieve the effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0028] This embodiment proposes a robot positioning method. This embodiment mentions a plurality of special nouns, and the special nouns mentioned in this embodiment are explained as follows:
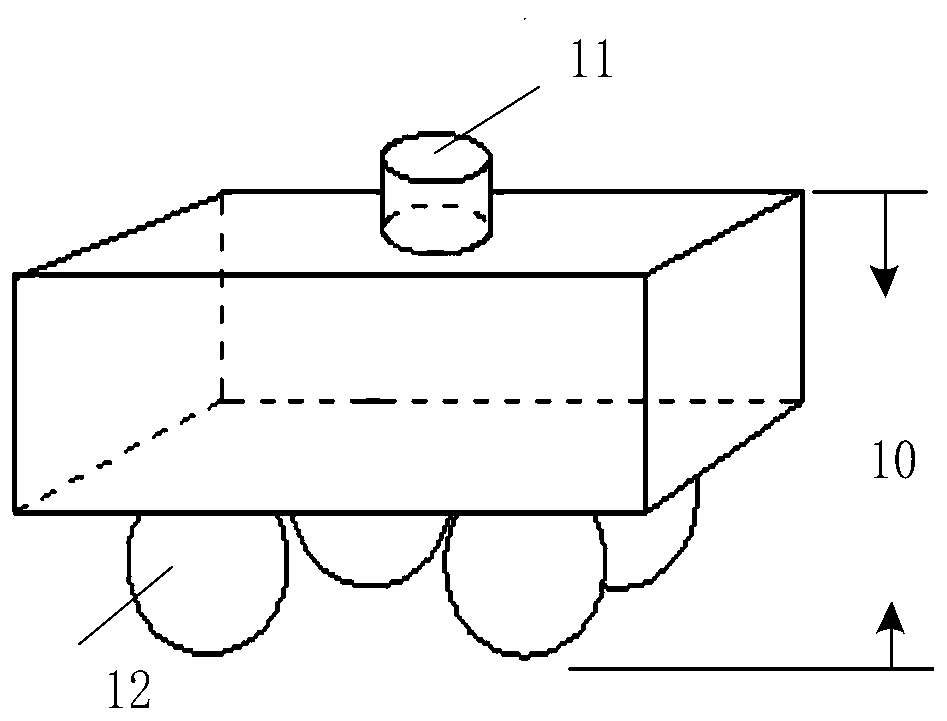
[0029] The "robot" in this embodiment is as figure 1 As shown, it includes a mobile base 10 and a laser sensor 11, wherein the mobile base 10 includes an odometer 12, a motion controller, a motor, a battery, and an embedded computer. The robot in this embodiment may be a robot capable of obtaining laser point cloud data and odometer information, and there is no excessive limitation on which components the robot specifically includes.
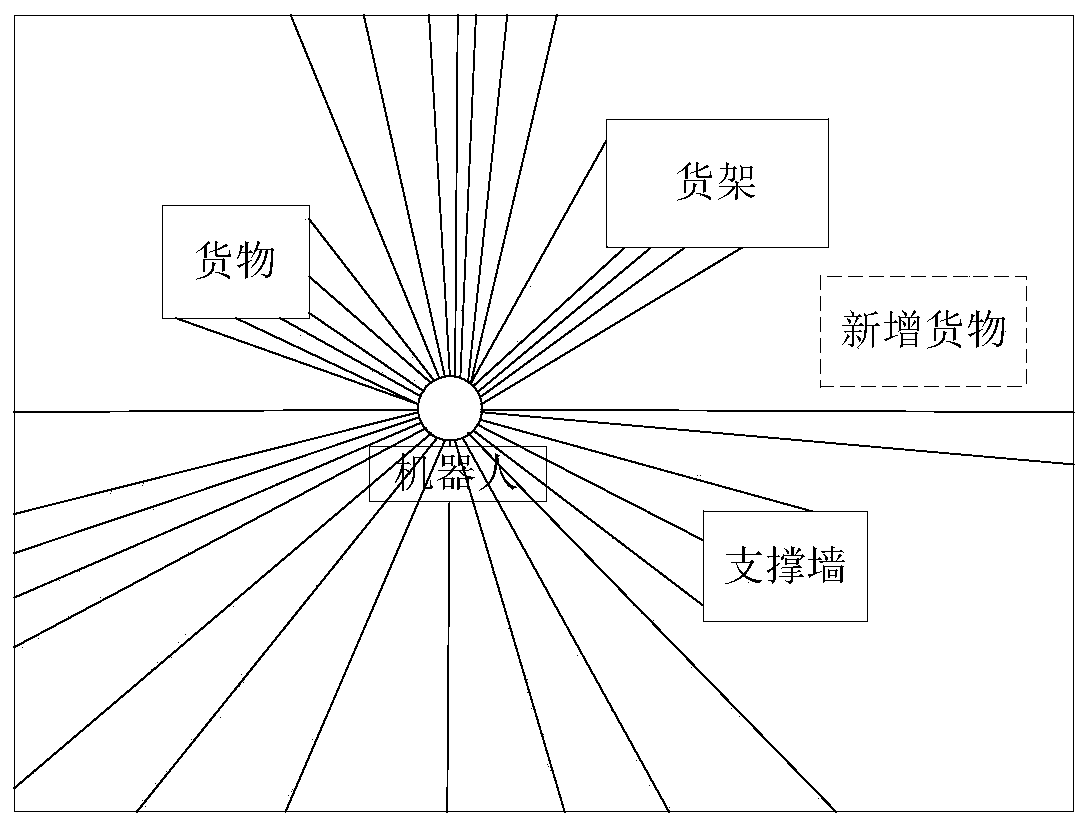
[0030] The "laser sensor 11" in this embodiment is a sensor used to obtain two-dimensional plane information, and is used to detect two-dimensional plane profile information of the surrounding environment. The scanning schematic diagram of the laser sensor is as follows figure 2 As shown, the laser sensor may be a 2D laser radar sensor, which is not lim...
Embodiment 2
[0117] This embodiment also provides a method for obtaining the pose from the laser point cloud data reflected by the reflector. The "reflector" in this embodiment is a material with strong laser reflectivity. When the laser data is scanned onto the reflector When , the point cloud received by the sensor has strong reflectivity and can be distinguished from the surrounding materials.
[0118] In this implementation, the laser point cloud data obtained at the initial moment can be traversed. When the reflectivity of the laser point cloud data is greater than the preset threshold, the laser point cloud data is used as the reflector data, indicating that the laser point cloud data is reflected from the reflector. Returned, you can judge the number of consecutive reflector data, the length of the reflector and the curvature of the current reflector, which are used to filter the interference points in the environment, such as filtering the environment and the reflector through the l...
Embodiment 3
[0162] This embodiment combines the above-mentioned implementations of Embodiment 1 and Embodiment 2. On the one hand, effective laser point cloud data and corresponding virtual point cloud data are used to perform pose correction. On the other hand, when the map update conditions are met, The current occupancy grid map can be updated. In the last aspect, the pose is obtained by using the laser point cloud data reflected from the reflector, and the latest determined pose is corrected.
[0163] Such as Figure 5 As shown, the specific implementation process is as follows:
[0164] Step 500: Obtain laser point cloud data at the initial moment, calibrate the position of the reflector, estimate the current pose based on the initial pose and odometer information, and generate an occupancy grid map at the same time;
[0165] Calibrate the position of the reflector: When determining the initial moment to obtain the laser point cloud data, determine the position of the robot in the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com