

Radar-Image Cross-modal Retrieval Method Based on Deep Hash Algorithm
A hash algorithm and image technology, applied in the field of radar-image cross-modal retrieval, can solve problems such as incompleteness and blurred images, and achieve the effect of small storage space, small data storage space, and fast retrieval speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment c
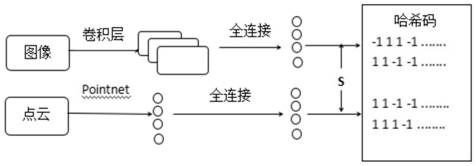
[0067] 3) see figure 1 , train the deep hash network, input the point cloud files and images preprocessed in step 2) into the deep hash network, and construct a similarity matrix S at the same time, so that the data between different modalities are correlated, so as to obtain the image Deep Learning Subnetwork Parameters θ x and point cloud deep learning subnetwork parameters θ y ; The specific method is as follows: wherein in the PointNet network, the input is a collection of all point cloud files of a frame, expressed as a vector of Nx3, wherein N represents the number of point clouds, N=3000, and 3 corresponds to the three components of the Cartesian coordinates, input The point cloud files in the training set are first aligned by multiplying the transformation matrix learned by a T-Net (an alignment network, which is part of the point cloud depth sub-network), which ensures the invariance of the PointNet network to specific space transformations. , after extracting the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More