Negative pressure pneumatic flexible knee joint exoskeleton real-time feedback and closed-loop control method
A real-time feedback, closed-loop control technology, applied in the field of lower extremity exoskeleton and negative pressure elastomer driver, flexible exoskeleton robot, can solve the goal of wearer's movement ability is far away, lower extremity exoskeleton can't coordinate movement, wearer's metabolism Consumption and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings and specific examples of implementation, but not as a limitation of the present invention.
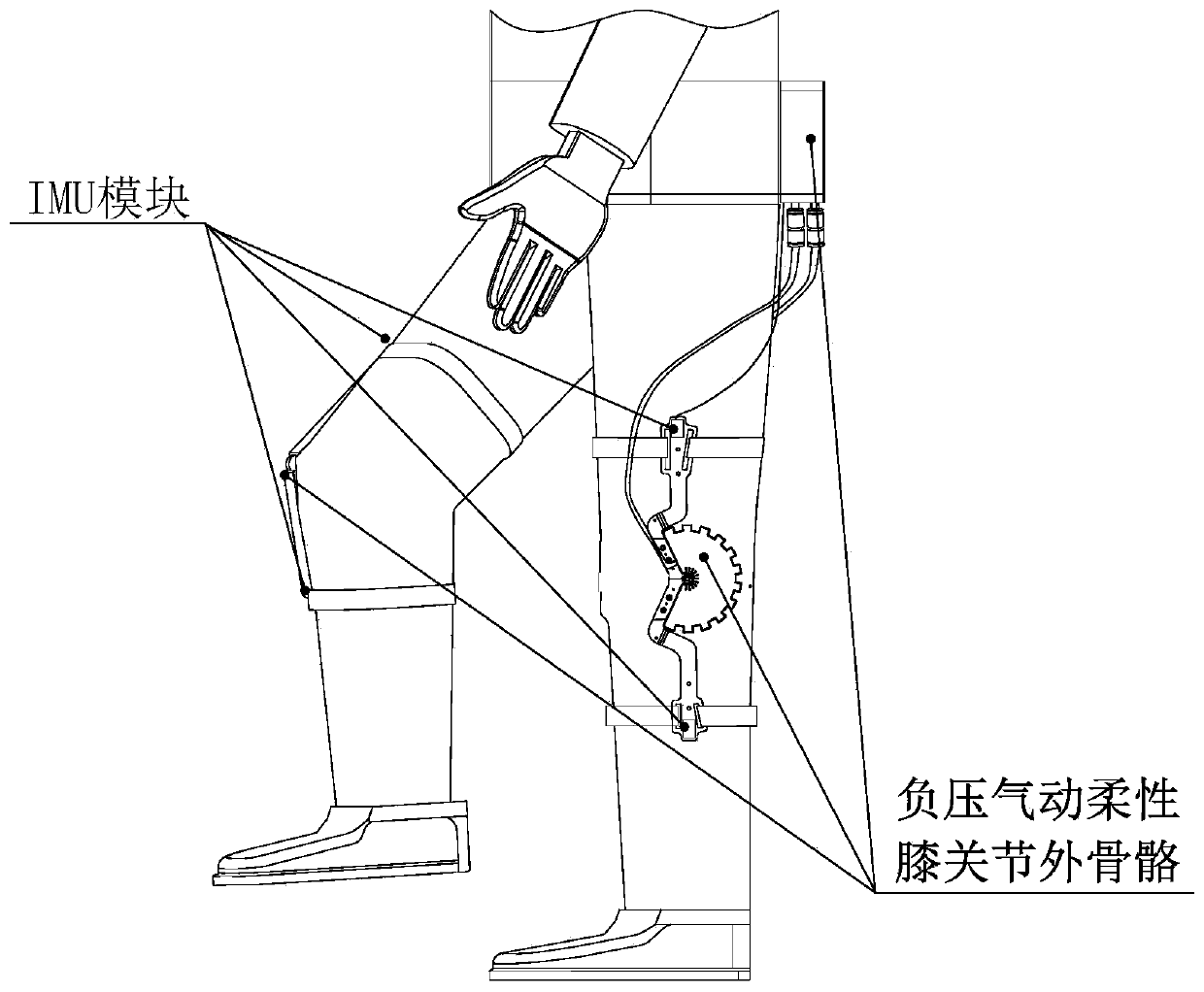
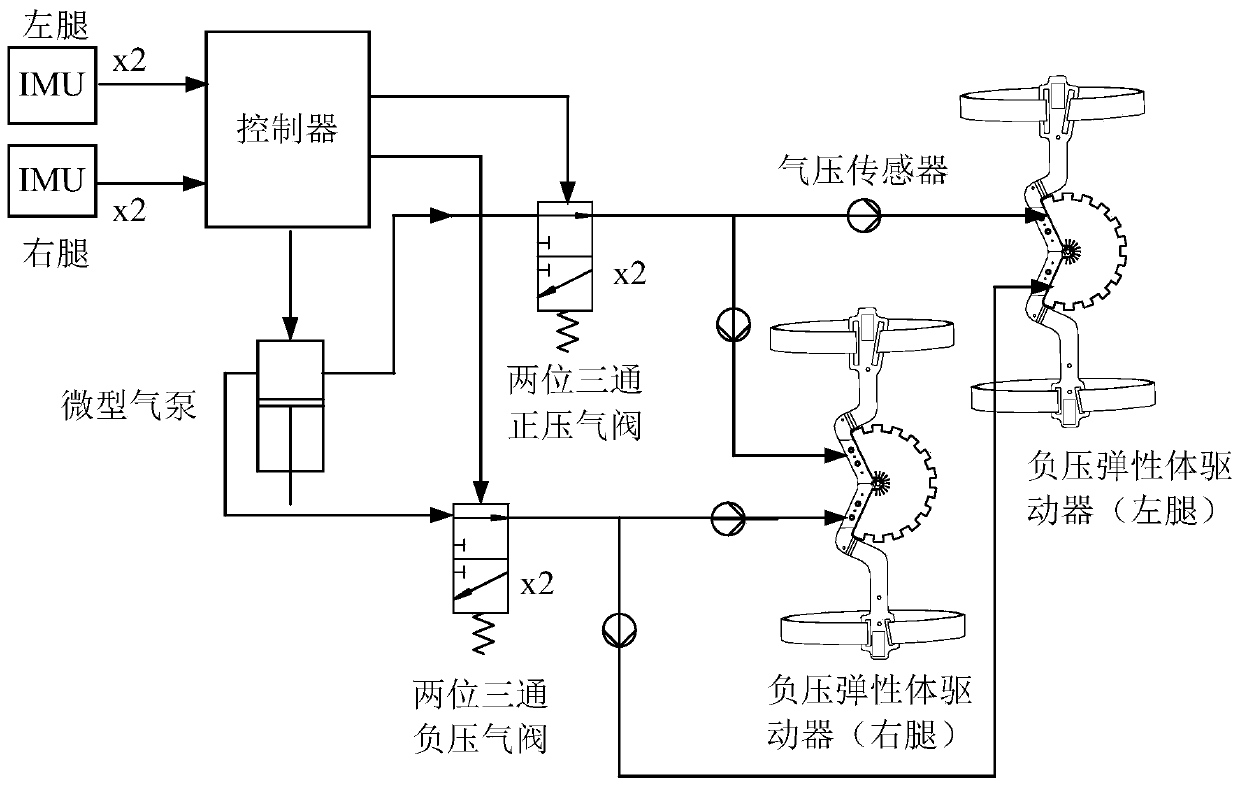
[0064] The invention provides a negative pressure pneumatic flexible knee joint exoskeleton real-time feedback and closed-loop control method. figure 1 and figure 2 Respectively, the schematic diagram of the negative pressure pneumatic flexible knee exoskeleton and the overall control scheme. like figure 1 and 2 As shown, the negative pressure pneumatic flexible knee exoskeleton includes a controller, a micro air pump, a two-position three-way negative pressure air valve, a two-position three-way positive pressure air valve, an inertial measurement unit module (IMU module), an air pressure sensor, a negative pressure It is composed of a pressure-rotating elastomer drive, a lithium battery pack, an air pipe, and installation and fixing structural parts.
[0065] The controller...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com