

Complex environment radar multi-target tracking and road driving environment prediction method
A technology of multi-target tracking and prediction method, which is applied in the fields of complex environment radar multi-target tracking and road driving environment prediction, and can solve the problems of inaccurate identification, low robustness and accuracy of target tracking algorithm, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
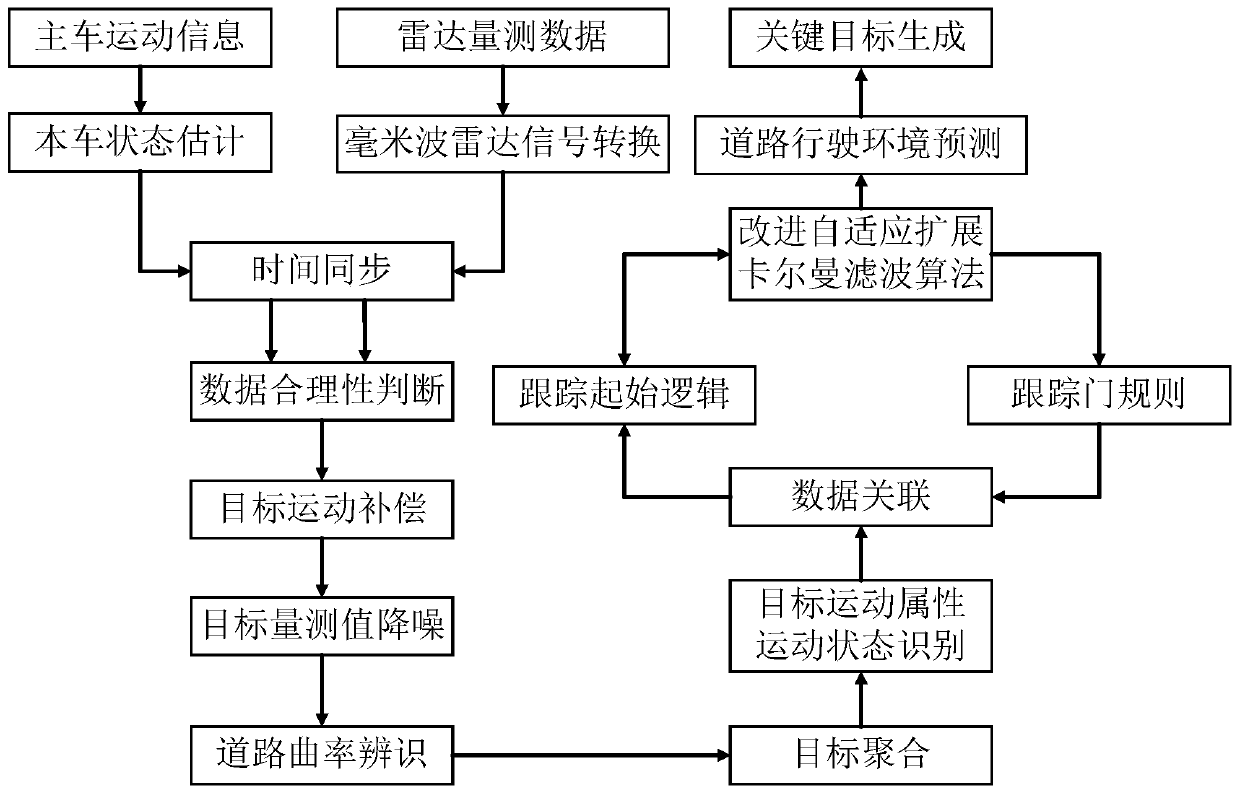
[0172] refer to figure 1 , the complex environment radar multi-target tracking and road driving environment prediction method proposed by the present invention consists of vehicle motion state estimation, millimeter wave radar signal conversion, time synchronization, data and rational judgment, target motion compensation, target measurement value noise reduction, road curvature Estimation, target aggregation, target motion attribute motion state recognition, improved adaptive extended Kalman filter algorithm tracking and data association, road driving environment prediction, and key target generation are completed together. The steps of the method are described below:
[0173] Step 1. Establish a two-degree-of-freedom dynamics model of the vehicle, the front wheel rotation angle δ, the longitudinal velocity v x As the input, use the Kalman filter to filter the longitudinal velocity and yaw rate and combine the vehicle two-degree-of-freedom dynamics model to observe the latera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More