Non-linear expansion state observer-based active suspension output feedback control method
An extended state observation, active suspension technology, applied in adaptive control, general control system, control/regulation system, etc. It can improve the stability of the body posture and ride comfort, save the measurement cost, and achieve the effect of fast convergence speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
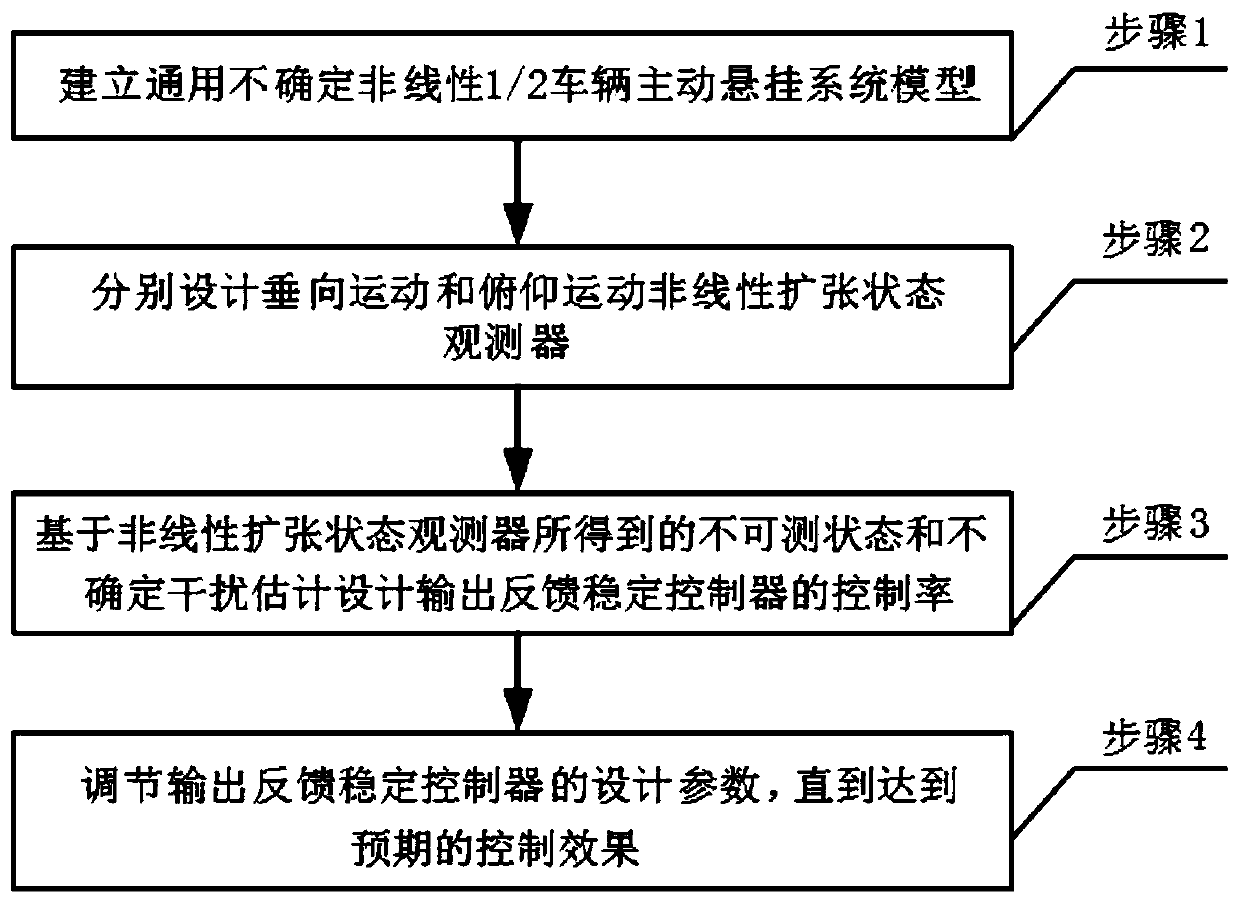
[0040] Such as figure 1 As shown, the active suspension output feedback control method based on the nonlinear extended state observer is implemented in the following steps:
[0041] Step 1, establishing a general uncertain nonlinear 1 / 2 vehicle active suspension system model;
[0042] Step 2, design the nonlinear extended state observers for vertical motion and pitch motion respectively;
[0043] Step 3, design the control rate of the output feedback stable controller based on the unmeasurable state and uncertain disturbance estimation obtained by the nonlinear extended state observer;
[0044] Step 4, adjust the design parameters of the output feedback stabilization controller until the expected control effect is achieved.
[0045] This embodiment proposes an active suspension output feedback control method based on a nonlinear extended state observer, and a general active suspension system model is established considering the complex nonlinearity and many uncertain factors...
specific Embodiment approach 2
[0048] The difference between this embodiment and the specific embodiment one is: the establishment of the general uncertain nonlinear 1 / 2 vehicle active suspension system model described in step one is specifically:
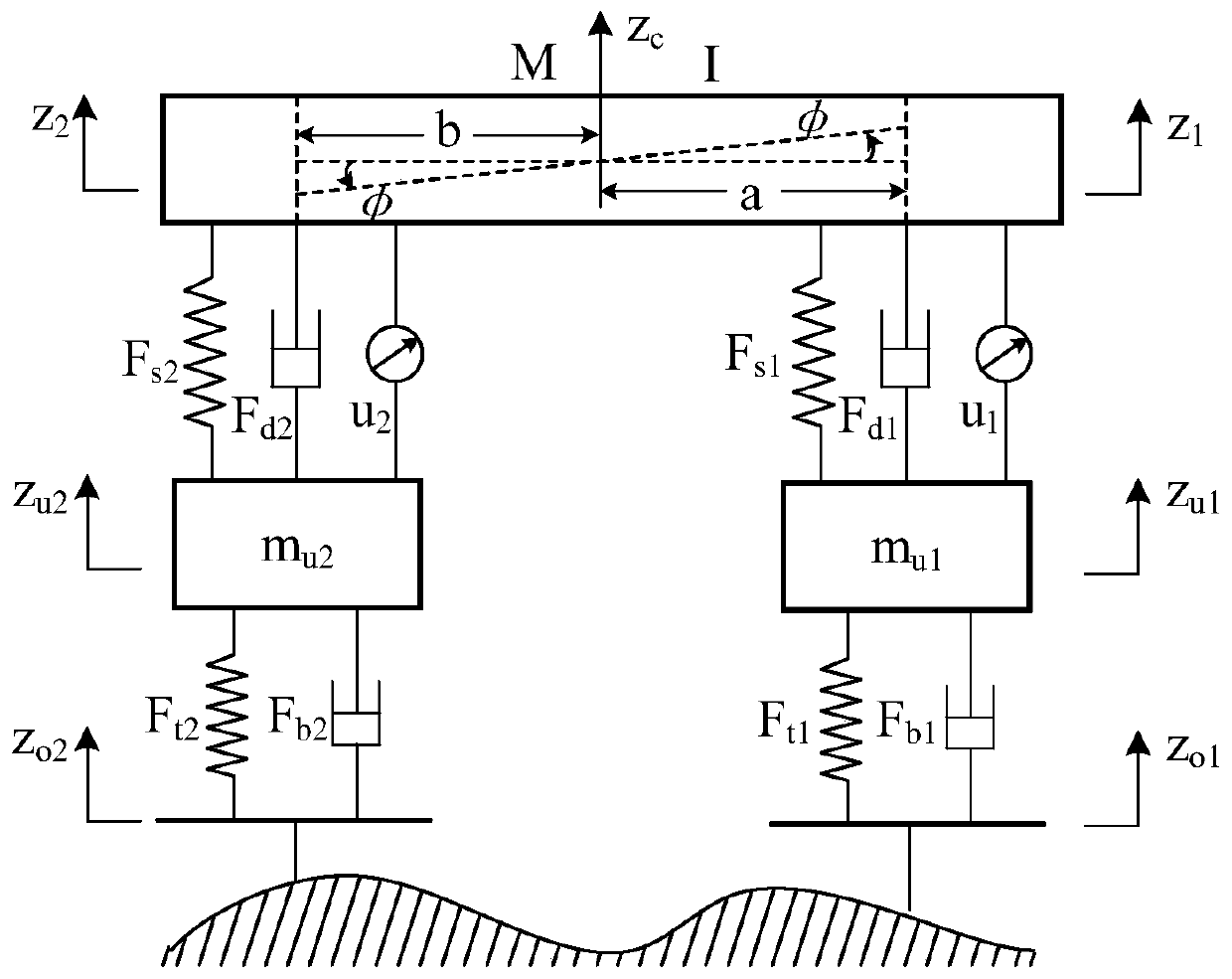
[0049] combine figure 2 The provided 1 / 2 vehicle active suspension system model, according to Newton's second law, the dynamics of the active suspension system can be expressed as:
[0050]
[0051] Among them, M represents the sprung mass of 1 / 2 vehicle active suspension system, I represents the moment of inertia of the pitching motion of the vehicle body, m u1 represents the unsprung mass of the front wheel, m u2 represents the unsprung mass of the rear wheel, F s1 and F d1 represent the spring force and damping force in the front suspension components, respectively, F s2 and F d2 denote the spring force and damping force in the rear suspension assembly respectively, F t1 and F b1 represent the elastic force and damping force generated by the front ...
specific Embodiment approach 3
[0062] The difference between this embodiment and the specific embodiment one or two is that the design of the nonlinear expansion state observer for vertical motion and pitch motion described in step two specifically includes the following two parts:
[0063] (1) Separately design vertical and pitch motion nonlinear expansion state observers
[0064] Define the active suspension system state variable x 1 =z c , x 4 = φ, The output of the active suspension system is y 1 =x 1 =z c ,y 2 =x 4 = φ. The observer designed in the present invention only uses the output signal of the active suspension system, and the output signal can be easily measured by inertial components such as gyroscopes.
[0065]
[0066]
[0067] in
[0068]
[0069] In the actual environment, the sprung mass will change with the number of passengers and the weight of the cargo, and the linear stiffness coefficient and linear damping coefficient of the suspension components will change wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More