

Sub-mother unmanned aerial vehicle unit based on folded combination form and combination method thereof
A combined form, sub-UAV technology, applied in the field of UAVs, to achieve the effect of reducing the occupied space, increasing the compactness, and increasing the loading capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
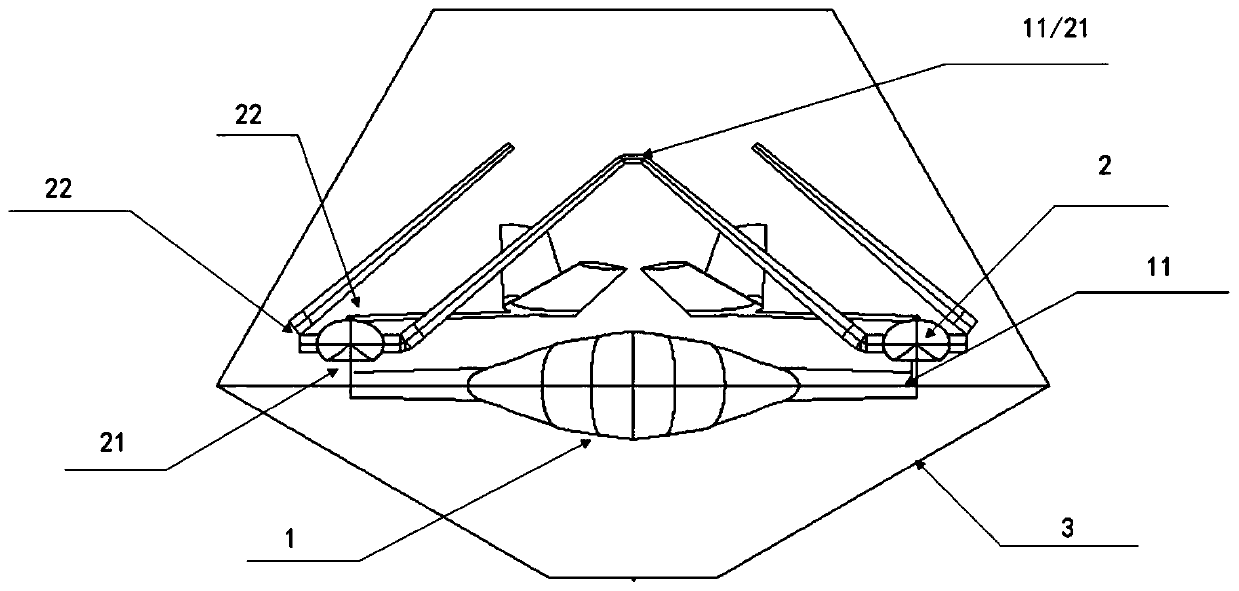
[0037] The present invention discloses a mother-child UAV group based on folding and combination, including a mother UAV 1 and a sub-UAV 2; the two sub-UAVs 2 are respectively connected and located on the mother UAV 1 on both sides of the flanks.
[0038] The present invention combines one main, two auxiliary and three unmanned aerial vehicles into the form of a sub-maternal unmanned aerial vehicle, which can adopt different strategies of combined flight and independent flight according to the task requirements at different stages of task execution, and at the same time can reduce the size of the unmanned aerial vehicle The occupied space increases the number of drones dropped.
[0039] Specifically, such as Figure 1-3 Shown:
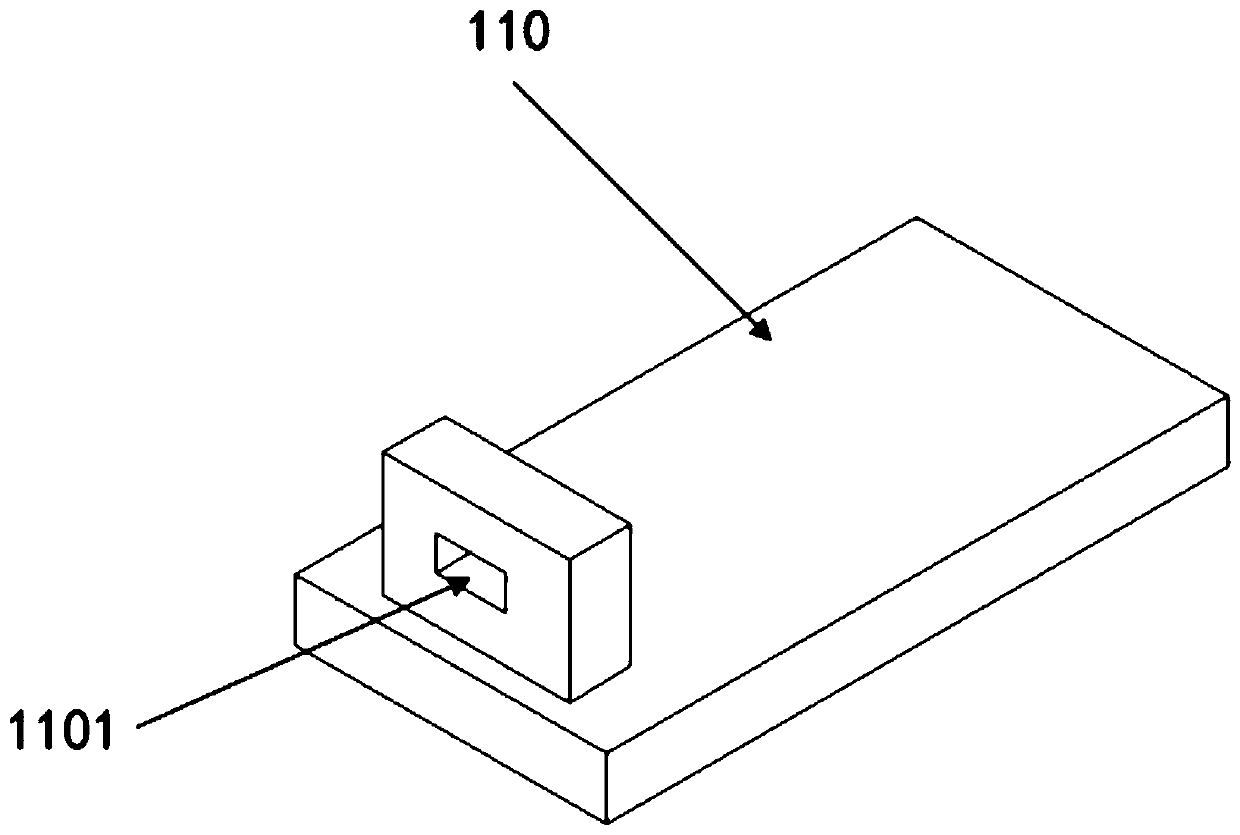
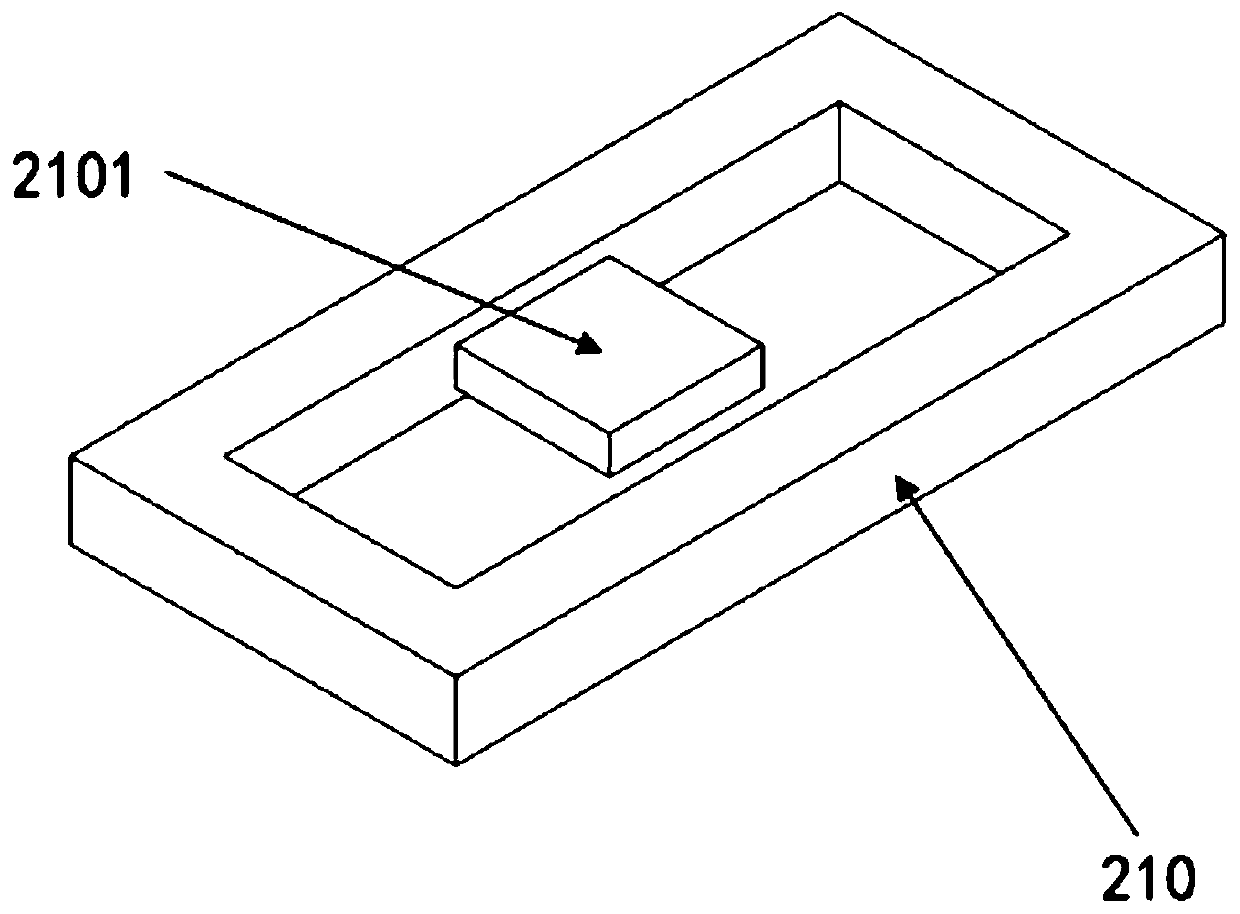
[0040] The flanks of the parent UAV 1 are provided with an actuating mechanism 11, and the belly of the child UAV 2 is provided with a slot mechanism 21, and the actuating mechanism 11 is matched and connected with the slot mechanism 21, further,
...
Embodiment 2
[0052] The present invention also provides a method for combining the sub-maternal unmanned aerial vehicle based on the folding combination form, using the sub-maternal unmanned aerial vehicle group based on the folding combination form described in Embodiment 1, including the following steps:
[0053] The step of connecting the mother and child drones: connecting the two child drones 2 to the two wings of the parent drone 1 through the actuating mechanism 11 and the slot mechanism 21, so that the two drones The child UAV 2 is located on the two wings of the parent UAV 1;
[0054] The wing connection step of the sub-drone: the two adjacent wings of the two sub-drone 2 are folded through the folding mechanism 21, and the actuating mechanism 11 and the slot mechanism at the wingtip are folded. 21 to connect;
[0055] Wing closing step of the sub-drone: the two outer wings of the two sub-drone 2 that are far away from each other are flipped toward the upper side of the fuselage ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More