

Under-actuated UUV horizontal plane trajectory tracking control method based on state prediction compensation
A trajectory tracking and control method technology, applied in attitude control, non-electric variable control, electric speed/acceleration control, etc., can solve problems such as negative impact on tracking performance and damage to system stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following examples describe the present invention in more detail.
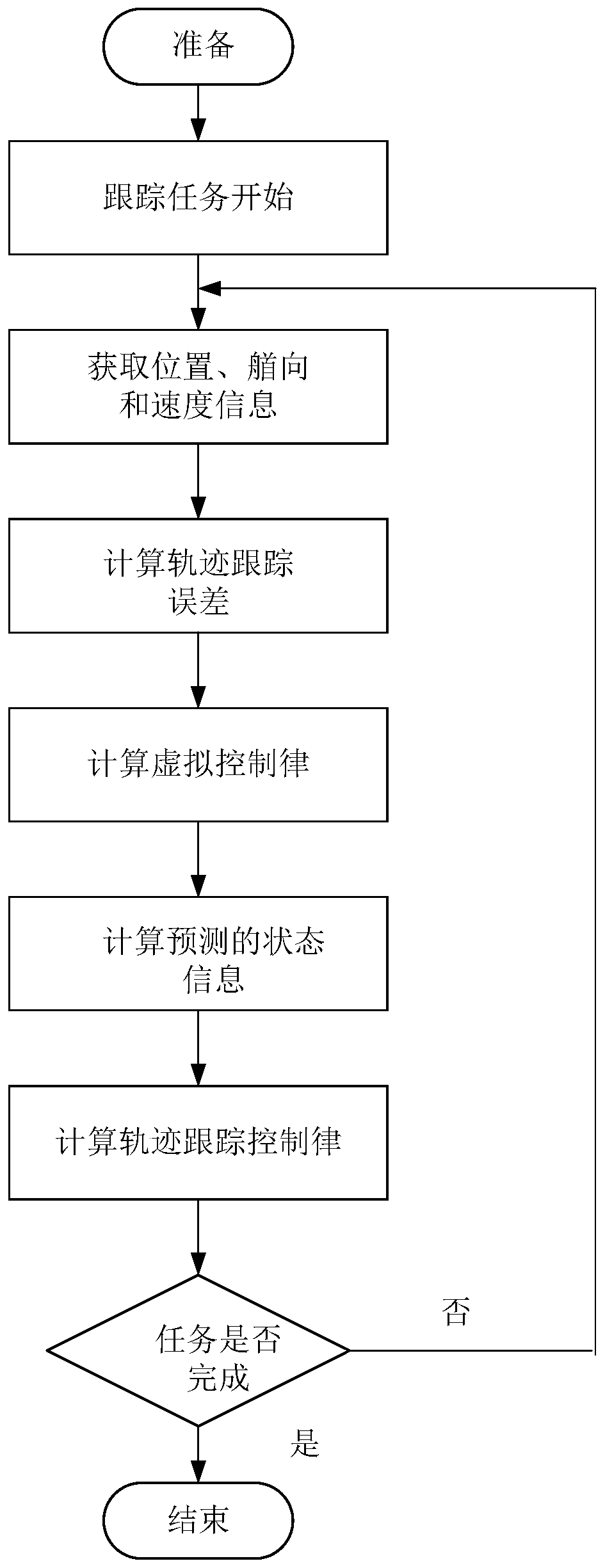
[0022] combine figure 1 , a kind of UUV level track tracking control method under the input time lag comprises the steps:
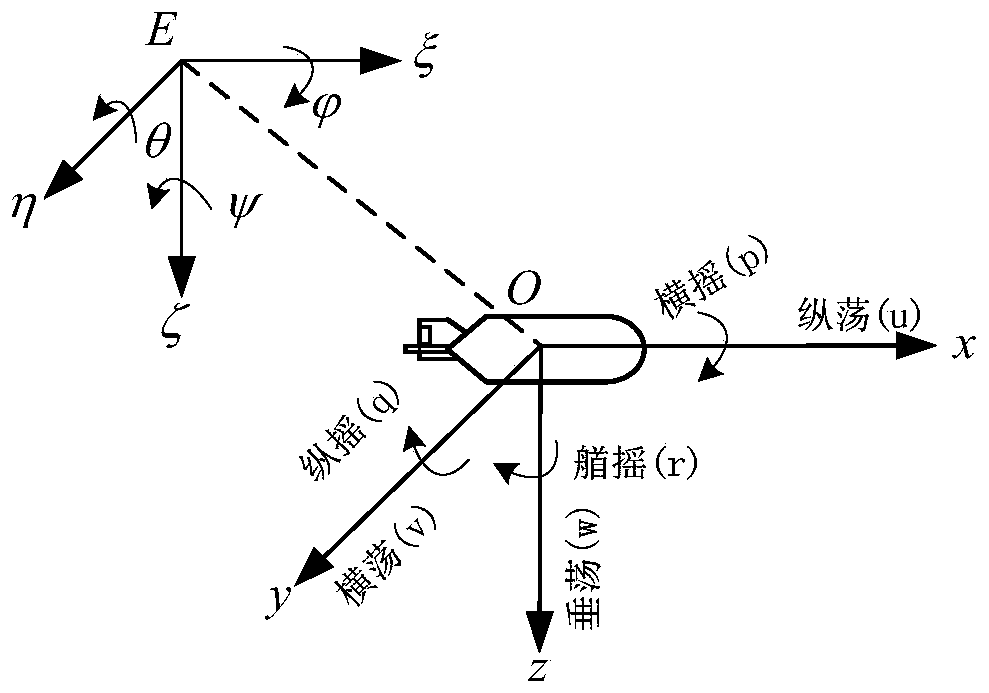
[0023] In step 1, according to the current task, the expected trajectory information X d (t)=[x d (t),y d (t),ψ d (t)] T Pass it to the UUV, and collect data through the navigation equipment and sensors carried by the UUV to obtain the current position information and heading information X(t)=[x(t),y(t),ψ(t)] T And speed information V(t)=[u(t), v(t), r(t)] T , x(t), y(t), ψ(t) are longitudinal displacement, lateral displacement and heading angle respectively, u(t), v(t), r(t) are longitudinal velocity, transverse velocity and bow angle respectively Angular velocity, x d (t),y d (t),ψ d (t) is the expected longitudinal displacement, lateral displacement and heading angle, X d (t) is the vector representation of the desired trajectory information.
[0024] In step 2, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More