

Robot grabbing pose estimation method combining geometric constraint
A pose estimation and geometric constraint technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems affecting the real-time performance of grasping detection and the lack of generalization performance of traditional methods, so as to achieve applicability and high computational efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following will clearly and completely describe the technical solutions in the embodiments of the present application with reference to the accompanying drawings in the embodiments of the present application. Obviously, the described embodiments are only for illustration, and are not intended to limit the present application.
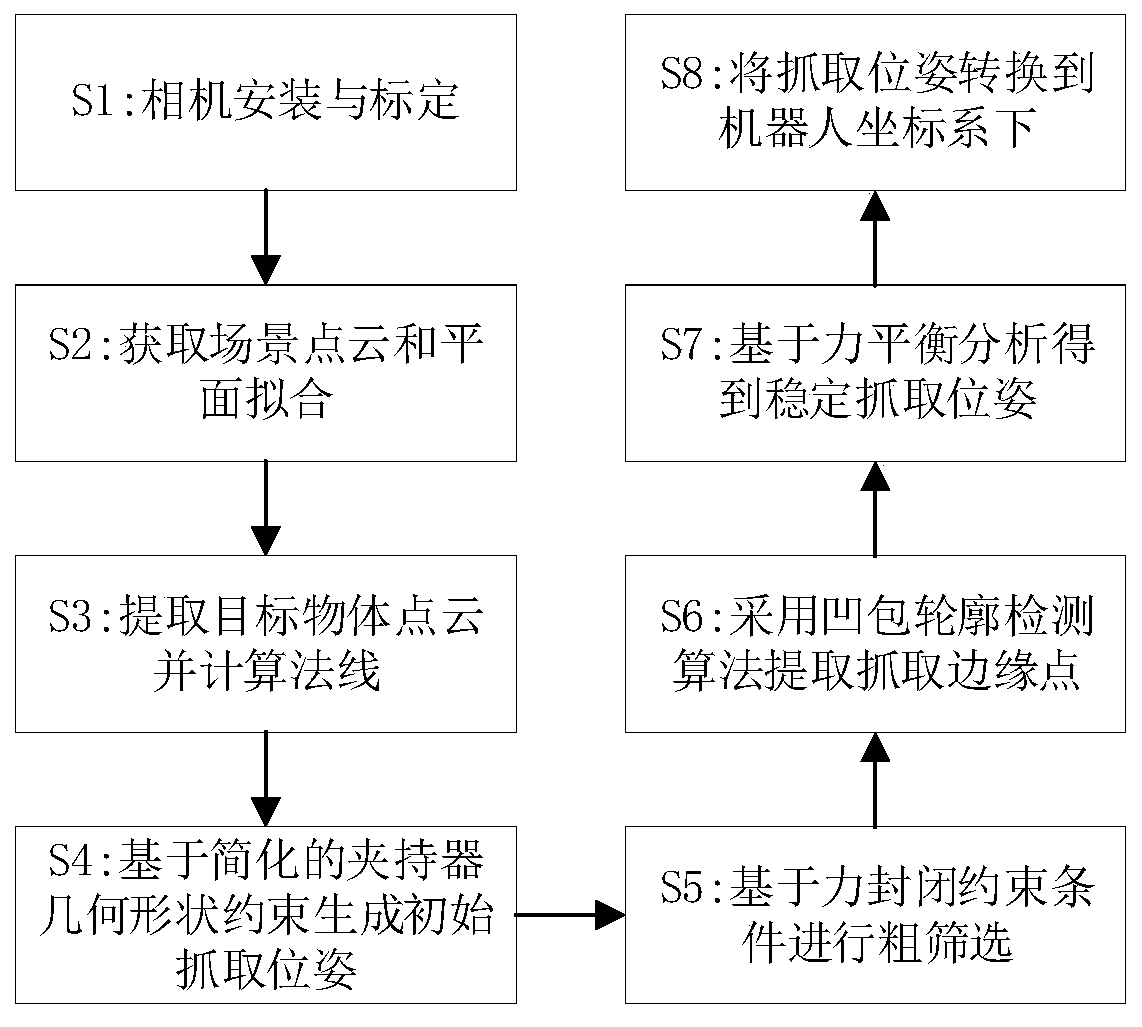
[0030] The experimental environment is the Kinetic version of ROS, based on the Ubuntu 16.04 operating system, and the computer configuration is Intel(R) Core(TM) i7 2.6GHz, 16GB RAM. Such as figure 1 As shown, the robot used in the example of the present invention is a Jaco robot, and the RGB-D camera used is Intel(R) RealSence SR300. The camera is installed at the end of the robot to form an eye-in-hand system. The target objects to be detected are all common objects in the home environment, and are placed in the area to be grasped on the test bench. Through the method for estimating the grasping pose of the target object described in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More