

Unmanned aerial vehicle charging system
A charging system and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of expensive and laborious, large number of unmanned aerial vehicles, etc., to achieve the effect of improving efficiency, realizing unmanned management, and avoiding manual wiring.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
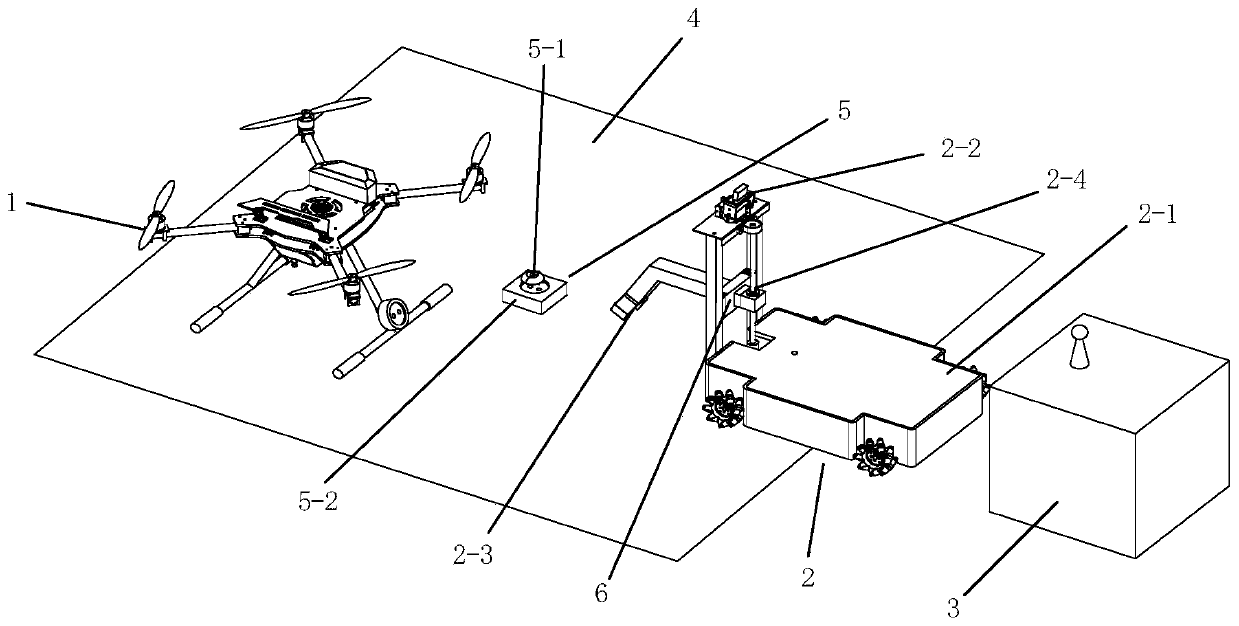
[0048] Such as Figure 1-2 As shown, a UAV charging system described in this embodiment includes a UAV 1, a mobile car 2, an auxiliary base station 3 and an apron 4;
[0049] UAV 1 is equipped with a charging interface;
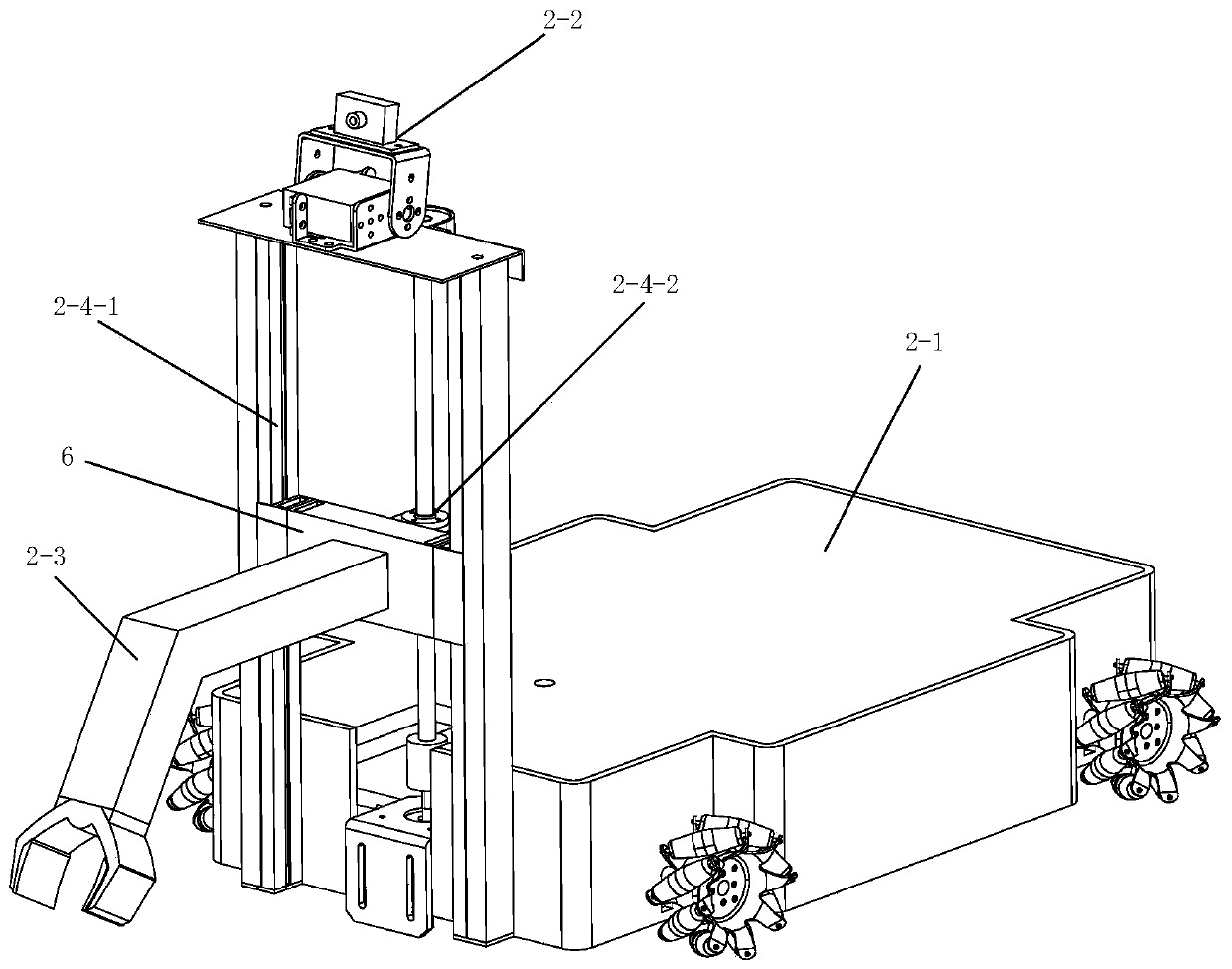
[0050] The mobile trolley 2 includes a trolley main body 2-1, a camera module 2-2, a GPS module, a trolley communication module, a main controller, a manipulator 2-3, and a vertical lifting mechanism 2-4; wherein, the vertical lifting mechanism 2-4 is set up on The front end of the car main body 2-1 in the forward direction, the manipulator 2-3 slides and fixes with the vertical lift mechanism 2-4 through the fixing part 6, the camera module 2-2 is installed on the top of the vertical lift mechanism 2-4, the GPS module and the car communicate Both the module and the main controller are installed on the trolley main body 2-1, and the main controller is respectively connected with the camera module 2-2, the GPS module, and the trolley communication module;
...
Embodiment 2
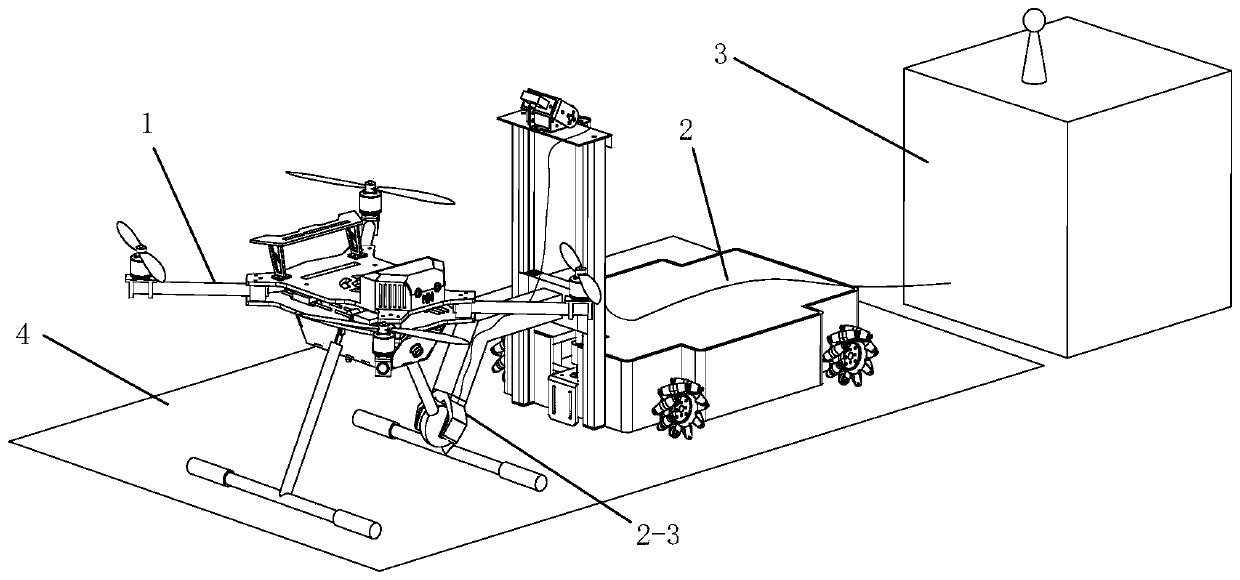
[0068] like image 3 As shown, compared with Embodiment 1 in Embodiment 2, there is no need to set charging module 5 on the ground surface of the apron 4;
[0069] The auxiliary base station 3 is also provided with a charging power supply to help the UAV 1 and the mobile car 2 to charge;
[0070] The charging interface carried by the UAV 1 is in the shape of a sphere with a charging interface marker, and the two parts opposite to the surface of the sphere are respectively provided with a positive pole and a negative pole connected to the battery of the UAV 1;
[0071] The manipulator 2-3 is a two-grip flexible manipulator, and the inner sides of the two fingers are respectively provided with a positive pole and a negative pole connected to the charging line directly pulled out from the charging power supply in the auxiliary base station 3;
[0072] When the manipulator 2-3 clamps the charging interface carried by the drone 1, the positive and negative poles of the two are con...
Embodiment 3
[0076] like Figure 4 As shown, compared with Embodiment 2 in Embodiment 3, the apron 4 is provided with a ceiling, and a power grid powered by the charging power supply of the auxiliary base station 3 is laid on the ceiling, and the trolley main body 2-1 is equipped with a power grid connected to the power grid. The vertical electric pole, the manipulator grasps the inner 2-3 positive and negative poles with two fingers to communicate with the vertical electric pole.
[0077] The difference between the working principle of the third embodiment and the working principle of the second embodiment is:
[0078] Change the UAV charging line originally connected to the manipulator 2-3 from the auxiliary base station 3 to the ground grid power supply mode, and there is a power grid on the ceiling of the apron 4, and the mobile car 2 passes through the vertical pole Power is taken from the ceiling, so that the charging lines of the drone will not cross, which is convenient for the ra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More